5Axis Kinetic from 2.8 on 2.7x
- Aciera
-

- Offline
- Administrator
-

- Posts: 4734
- Thank you received: 2121
I got mine here:
eusurplus.com/index.php?route=product/category&path=59_62_71
Please Log in or Create an account to join the conversation.
- OT-CNC
- Offline
- Platinum Member
-

- Posts: 617
- Thank you received: 75
Thanks for posting the switchkins info.
I'm working on a standard 5 axis config at the moment with a double y for gantry. Could switchkins be a solution to standard homing and jogging in trivkins mode,double y, then switching to 5axiskins or xyzbc-trt-kins do the tcp? I assume I would still need to address the joint synchronization. This would be a tiliting rotating spindle machine.
I started a new thread as I need guidance with the basics on multi axis setup XYYZBC-str config :
Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-

- Posts: 226
- Thank you received: 14
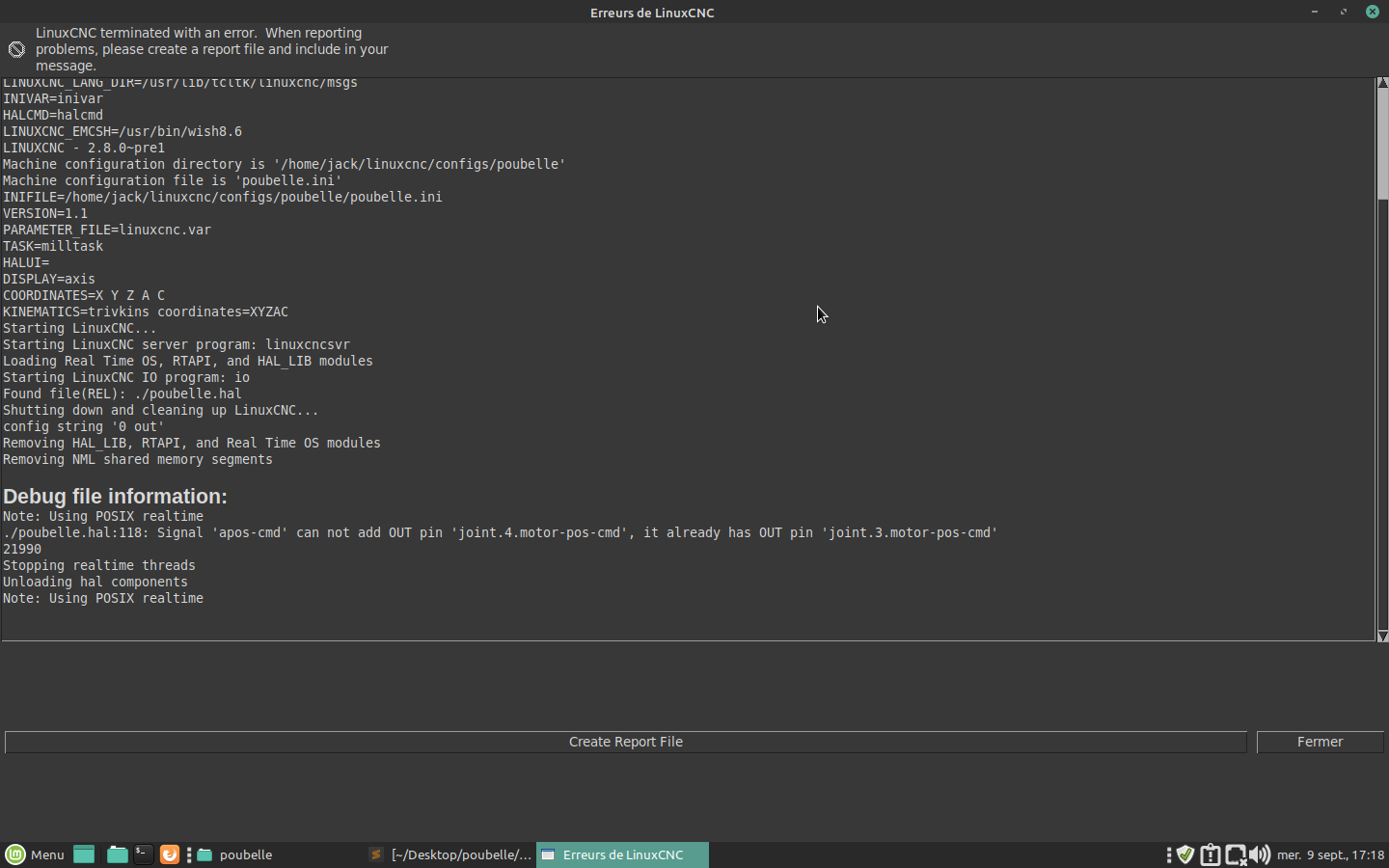
- In order to start again on a virgin Lcnc configuration, I bought a virgin PC, installed linuxmint 19+ lcnc 2.8. in order to be able to use the xyzac-trt-kins module (5 axis synchronization)
-Now I find the inability to configure my .hal & .ini files.
-I cannot, on version 2.8, reconfigure my 5 axes (standrad "trivkins" module to begin with.
- I created a configuration (under 2.8 Lcnc) 4 axes and mondified the ".hal / .ini" files) from my old configuration ( Lcnc 2.7.14) in order to put my 5 axes (xyzac) back, and change some variables like (JOINT / AXIS. ..etc
- and there I encounter a lot of problem impossible to demerer Lcnc, always an error.
- I attach my last two files.
Could you please help me out and say what's wrong?
Thank you in advance for your help .
Regards
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

- Posts: 21691
- Thank you received: 7413
setp stepgen.5.position-scale [JOINT_5]SCALE
setp stepgen.5.steplen 1
setp stepgen.5.stepspace 0
setp stepgen.5.dirhold 35000
setp stepgen.5.dirsetup 35000
setp stepgen.5.maxaccel [JOINT_3]STEPGEN_MAXACCEL
net apos-cmd joint.5.motor-pos-cmd => stepgen.5.position-cmd
net apos-fb stepgen.5.position-fb => joint.5.motor-pos-fb
net astep <= stepgen.5.step
net adir <= stepgen.5.dir
net aenable joint.5.amp-enable-out => stepgen.5.enableAnd in your ini file
[JOINT_5]Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-
- Posts: 226
- Thank you received: 14
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4734
- Thank you received: 2121
You need to use new signal-names, like this:
setp stepgen.4.position-scale [JOINT_4]SCALE
setp stepgen.4.steplen 1
setp stepgen.4.stepspace 0
setp stepgen.4.dirhold 35000
setp stepgen.4.dirsetup 35000
setp stepgen.4.maxaccel [JOINT_4]STEPGEN_MAXACCEL
net bpos-cmd joint.4.motor-pos-cmd => stepgen.4.position-cmd
net bpos-fb stepgen.4.position-fb => joint.4.motor-pos-fb
net bstep <= stepgen.4.step
net bdir <= stepgen.4.dir
net benable joint.4.amp-enable-out => stepgen.4.enable
Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-
- Posts: 226
- Thank you received: 14
thanks again
Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-
- Posts: 226
- Thank you received: 14
- I was therefore able to carry out my configuration and run Lcnc 2.8 without error.
- Effectively the emergency stop button and the original socket contacts no longer work with version 2.8.
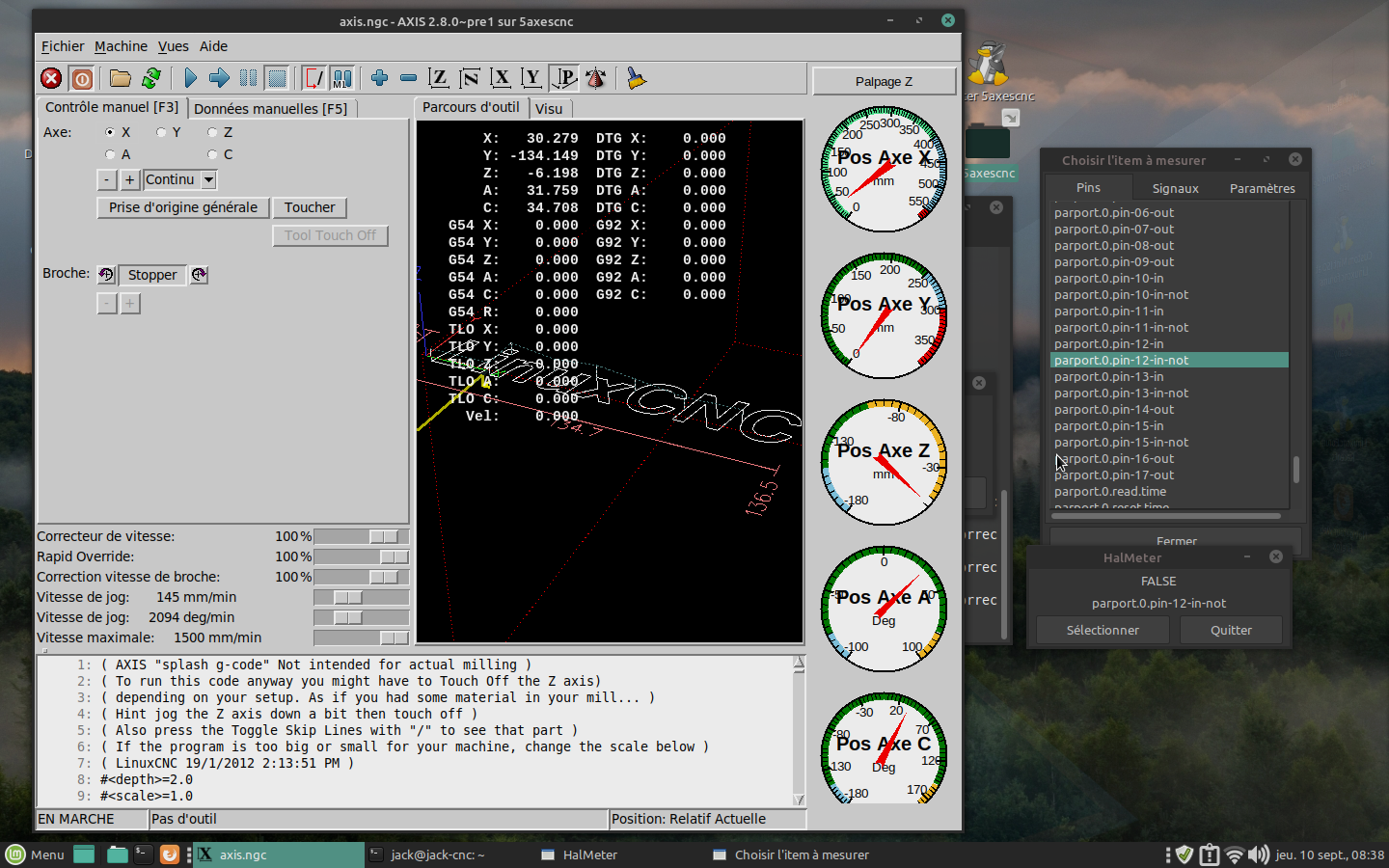
- However, I checked with "halmetre" and all the signals pass without problem ??? I have communication with my "break out" card.
- If again you can help me, i attach my .hal & .ini file ?
Thank you for your attention
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4734
- Thank you received: 2121
I'm not clear what you mean by " original socket contacts".
Can you start the machine through the gui or does the external emergency stop signal keep the gui in estop?
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4734
- Thank you received: 2121
net estop-out => parport.0.pin-01-out
net estop-ext <= parport.0.pin-10-in-not
#net estop-loop parport.0.pin-01-in iocontrol.0.emc-enable-in
and farther down:
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
This looks a bit odd:
If you have your external estop connected to parport.0.pin-10-in-not then you have not connected the signal estop-ext to anything
also estop-loop parport.0.pin-01-in is commented out
Please Log in or Create an account to join the conversation.