XHC-WHB04B-6 LinuxCNC not working
- alkabal
- Offline
- Platinum Member
-

- Posts: 476
- Thank you received: 52
Ok thanks for suggestion i will check for some motion.pin.
But only for stuff that can be used when program.is.running ? (like spindle override and feed override)
Except that a pendant is mostly a user component, or i'm wrong ?
Is this have more sense ? "In Mpg mode the step speed is in percent of max-velocity"
(if yes the good pin it is halui.max-velocity.value for calc ?)
i have do some test using halui.max-velocity.value * feed-button-position * 0.01 and i see the machine cant' move more than 16mm with one pulse but off course i think is better to use smaller value.
resulting value :
2% : 70 x 2 x 0.01 = 1.4 = move 1.4mm
5% : 70 x 5 x 0.01 = 3.5 =move 3.5mm
10% : 70 x 10 x 0.01 = 7 = move 7mm
30% : 70 x 30 x 0.01 = 21 = move 16mm
60% : 70 x 60 x 0.01 = 42 = move 16mm
100% : 70 x 100 x 0.01 = 70 = move 16mm
Please Log in or Create an account to join the conversation.
- alkabal
- Offline
- Platinum Member
-
- Posts: 476
- Thank you received: 52
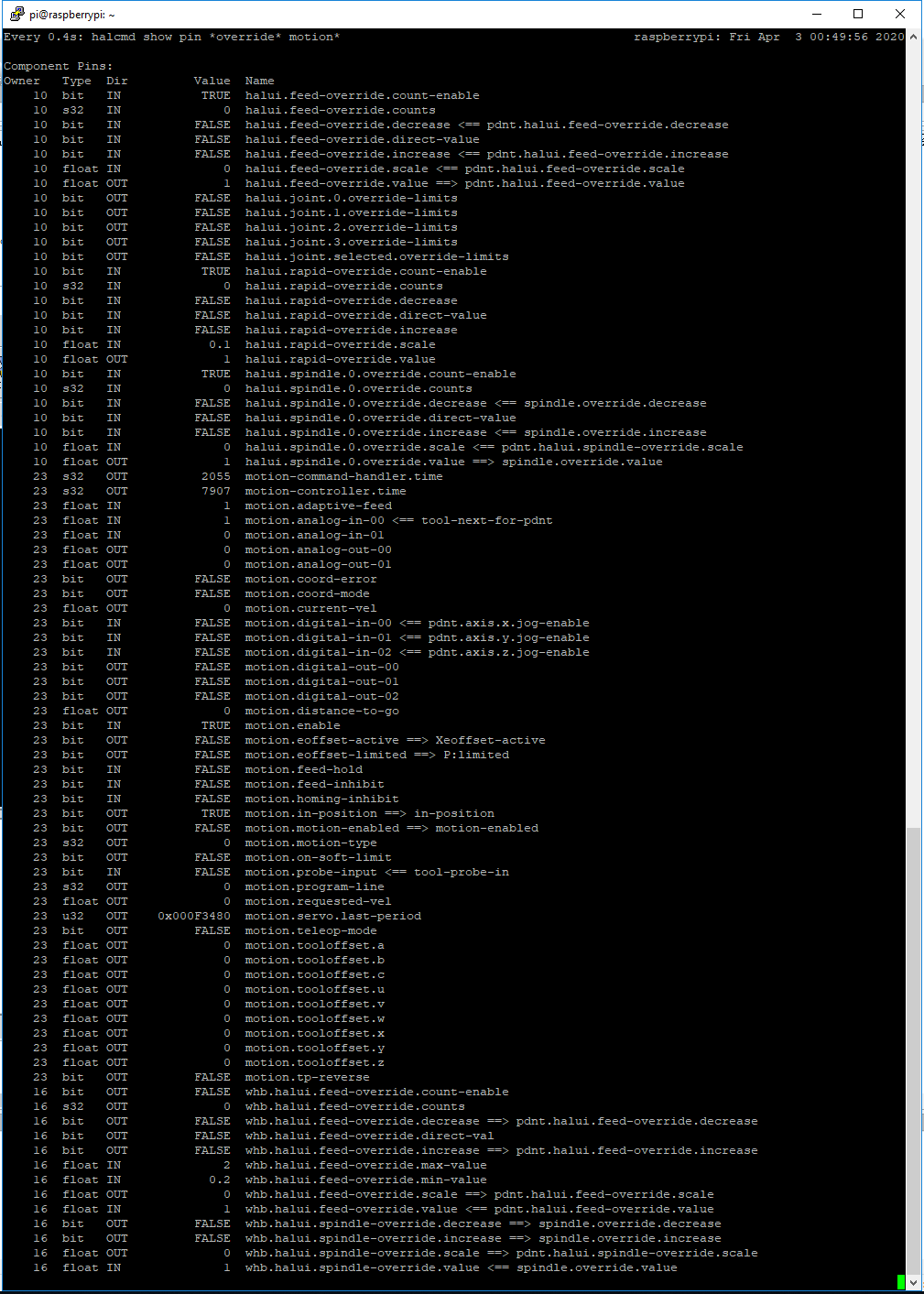
Attachments:
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

- Posts: 19886
- Thank you received: 4645
Except that a pendant is mostly a user component, or i'm wrong ?
USB ones are, yes.
MPGs connected by ABZ wires to encoder counters in HAL and buttons connected to HAL can be realtime all the way.
Please Log in or Create an account to join the conversation.
- alkabal
- Offline
- Platinum Member
-
- Posts: 476
- Thank you received: 52
I have do a big cleaning for source code and use max-velocity for mpg
Two more stuff liked but no idea for do this for now
-swap spindle speed displayed on the pendant from Override % to Current-velocity regarding to used button (spindle+/+ or override+/-)
-Restore the MPG/CON/STEP usage for now the code force MPG at startup and does not allow to use the CON mode.
Please Log in or Create an account to join the conversation.
- alkabal
- Offline
- Platinum Member
-
- Posts: 476
- Thank you received: 52
I have forked Lcnc master and add the revised driver, i like if you can check and says if i can ask to PR ?
Br
github.com/alkabal/linuxcnc
Please Log in or Create an account to join the conversation.
- alkabal
- Offline
- Platinum Member
-
- Posts: 476
- Thank you received: 52
github.com/alkabal/linuxcnc/commit/8c83d...442dd4b7210fceafe791
Please Log in or Create an account to join the conversation.
- MarcoGaspar
- Offline
- Premium Member
-

- Posts: 90
- Thank you received: 2
I installed Debian 9 and linuxcnc 2.9 and try to setup my xhc-whb04b-4 to work but with no luck.
When starting linuxcnc and i get error:
Debug file information:
Note: Using POSIX realtime
failed to allocate HAL memory
./xhc-whb04b-6.hal:29: waitpid failed xhc-whb04b-6 xhc-whb04b-6
./xhc-whb04b-6.hal:29: xhc-whb04b-6 exited without becoming ready
But if i run
halrun
loadusr xhc-whb04b-6 -ue
It connects and show all the info from pendant.
What can i do?
Please Log in or Create an account to join the conversation.
- alkabal
- Offline
- Platinum Member
-
- Posts: 476
- Thank you received: 52
Can you attach your config file ini and hal ? mostly for see the loadusr cmd (loadusr -W xhc-whb04b-6 -Hsf)
Please Log in or Create an account to join the conversation.
- MarcoGaspar
- Offline
- Premium Member
-
- Posts: 90
- Thank you received: 2
git clone github.com/LinuxCNC/linuxcnc linuxcnc-dev
cd linuxcnc-dev
cd src
./autogen.sh
./configure --with-realtime=uspace
make
sudo make setuid
it's only a test config, i will be using mesa 7i96e
Please Log in or Create an account to join the conversation.
- alkabal
- Offline
- Platinum Member
-
- Posts: 476
- Thank you received: 52
good one"loadusr -W xhc-whb04b-6 -H" or "loadusr -W xhc-whb04b-6 -Hsf"
But where did you get the "xhc-whb04b-6.hal" because i see something related to original component for machinekit ???
You need to use the one "example-configuration.md" in the source folder and rename to "xhc-whb04b-6.hal"
You can add "sf" args for use lead and Mpg mode for feed and spindle override
I use the same card 7i96e but a run in place instal
Please Log in or Create an account to join the conversation.