scurve trajectory planner
- Grotius
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 2419
- Thank you received: 2348
25 Mar 2025 18:15 - 25 Mar 2025 18:21 #324902
by Grotius
Replied by Grotius on topic scurve trajectory planner
Hello,
It's solved.
Git is updated.
@Evgen can replace or overwrite the tp_scurve.c from codeberg.
Then do a recompile for cmake : ./buid_cmake
The problem:
In control.c Line 1867 it looks for 2 types :
EMC_MOTION_TYPE_FEED
EMC_MOTION_TYPE_ARC
Clothoid motion was giving no type.
Then the clothoid motion is now set to type EMC_MOTION_TYPE_FEED in the planner.
Now the motion.feed-value flippering is not there anymore.
It's solved.
Git is updated.
@Evgen can replace or overwrite the tp_scurve.c from codeberg.
Then do a recompile for cmake : ./buid_cmake
The problem:
In control.c Line 1867 it looks for 2 types :
EMC_MOTION_TYPE_FEED
EMC_MOTION_TYPE_ARC
Clothoid motion was giving no type.
Then the clothoid motion is now set to type EMC_MOTION_TYPE_FEED in the planner.
Now the motion.feed-value flippering is not there anymore.
Last edit: 25 Mar 2025 18:21 by Grotius.
The following user(s) said Thank You: Todd Zuercher, akb1212, tommylight, HalaszAttila, pommen, Aciera, Darium
Please Log in or Create an account to join the conversation.
- HalaszAttila
- Offline
- Premium Member
-

Less
More
- Posts: 149
- Thank you received: 5
26 Mar 2025 05:56 #324940
by HalaszAttila
Replied by HalaszAttila on topic scurve trajectory planner
Hello,
I've been waiting for this feature for a long time and I'd like to test it out. Is it compatible with Debian 10 + LinuxCNC v2.8.4?
I've been waiting for this feature for a long time and I'd like to test it out. Is it compatible with Debian 10 + LinuxCNC v2.8.4?
Please Log in or Create an account to join the conversation.
- Evgen
- Offline
- New Member
-

Less
More
- Posts: 4
- Thank you received: 3
26 Mar 2025 08:57 - 26 Mar 2025 08:57 #324947
by Evgen
Replied by Evgen on topic scurve trajectory planner
I tested it. The problem is solved. I'll corect my post for automatical addition right P value, but it's interesting task, how calculate it.
And another question. How can I make deb package with new planner?
And another question. How can I make deb package with new planner?
Last edit: 26 Mar 2025 08:57 by Evgen.
The following user(s) said Thank You: Aciera
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
26 Mar 2025 19:25 - 26 Mar 2025 19:25 #325000
by Grotius
Replied by Grotius on topic scurve trajectory planner
@HalaszAttila,
Mabye just give it a try on a LinuxCNC v2.8.4 version.
The repository has info how to install, patch.
Maybe others can help to setup a vm and test it for you, as my vm is broken at the moment.
@Evgen,
That is not possible unless you edit the source in the ~/debian dir.
For shipping software, you can considering using ~/opt/linuxcnc as the installation dir for a .deb package.
Creating a .deb package from linuxcnc that installs in ~/opt/linuxcnc dir is clean way to go.
Mabye just give it a try on a LinuxCNC v2.8.4 version.
The repository has info how to install, patch.
Maybe others can help to setup a vm and test it for you, as my vm is broken at the moment.
@Evgen,
That is not possible unless you edit the source in the ~/debian dir.
For shipping software, you can considering using ~/opt/linuxcnc as the installation dir for a .deb package.
Creating a .deb package from linuxcnc that installs in ~/opt/linuxcnc dir is clean way to go.
Last edit: 26 Mar 2025 19:25 by Grotius.
The following user(s) said Thank You: HalaszAttila
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
27 Mar 2025 14:40 #325064
by Grotius
Replied by Grotius on topic scurve trajectory planner
Hi all,
Today a new feature is added to the planner.
Jog in pause state.
It captures keyboard buttons for xyz axis in pause state.
This feature should work for every used linuxcnc gui, axis, gmocappy, qtvcp, etc. The whole mickmack.
When resuming the motion, the xy is running back to pause-pos, then the z is running back to pause-pos.
Next feature is tangential knife.
Will do that next time.
Today a new feature is added to the planner.
Jog in pause state.
It captures keyboard buttons for xyz axis in pause state.
This feature should work for every used linuxcnc gui, axis, gmocappy, qtvcp, etc. The whole mickmack.
When resuming the motion, the xy is running back to pause-pos, then the z is running back to pause-pos.
Next feature is tangential knife.
Will do that next time.
The following user(s) said Thank You: akb1212, tommylight, Clive S, HalaszAttila, pommen, yrsiddhapura, FabianB
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4754
- Thank you received: 2134
27 Mar 2025 15:40 #325069
by Aciera
This is a cool feature but IMO the use of keyboard keys for jogging is rather unfortunate. There have been several calls to move away from keyboard jogging. Why not use one of the existing hal pins like 'halui.axis.L.minus', 'halui.axis.L.plus' or better yet create dedicated hal pins for jogging while paused.
Replied by Aciera on topic scurve trajectory planner
It captures keyboard buttons for xyz axis in pause state.
This is a cool feature but IMO the use of keyboard keys for jogging is rather unfortunate. There have been several calls to move away from keyboard jogging. Why not use one of the existing hal pins like 'halui.axis.L.minus', 'halui.axis.L.plus' or better yet create dedicated hal pins for jogging while paused.
The following user(s) said Thank You: skunkworks, HalaszAttila, Grotius
Please Log in or Create an account to join the conversation.
- skunkworks
- Away
- Moderator
-

Less
More
- Posts: 350
- Thank you received: 153
27 Mar 2025 17:15 #325076
by skunkworks
Replied by skunkworks on topic scurve trajectory planner
This is awesome!! Great work to everyone involved.
I agree with Aciera - keyboard jogging is way at the bottom of the list. I have many large machines that are never jogged by the keyboard.
sam
I agree with Aciera - keyboard jogging is way at the bottom of the list. I have many large machines that are never jogged by the keyboard.
sam
The following user(s) said Thank You: HalaszAttila, Grotius
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
27 Mar 2025 19:06 #325089
by Grotius
Replied by Grotius on topic scurve trajectory planner
Hi Guys,
Thanks for feedback.
Now we added hal pins for jogging xyz in pause state.
The halui pins are unreachable from within the tpmod component.
Then tpmod has it's own hal pins for jog in pause.
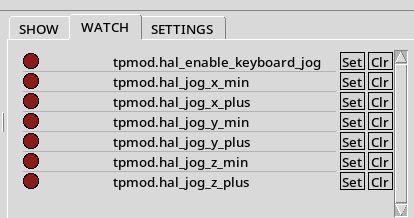
For the one's who still want to do keyboard jogging in pause state, like plasma cnc's :
Thanks for feedback.
Now we added hal pins for jogging xyz in pause state.
The halui pins are unreachable from within the tpmod component.
Then tpmod has it's own hal pins for jog in pause.
For the one's who still want to do keyboard jogging in pause state, like plasma cnc's :
- enable the jog keyboard hal pin.
Attachments:
The following user(s) said Thank You: robh, HalaszAttila, wellingtoncsouza, Darium
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
27 Mar 2025 21:43 #325108
by Grotius
Replied by Grotius on topic scurve trajectory planner
Hi all,
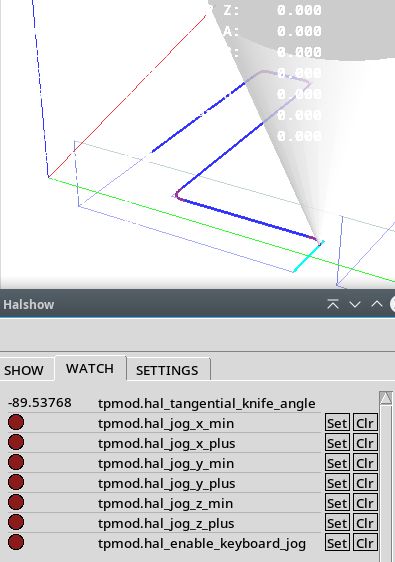
Today we added another feature to the scurve planner : tangential knife
The planner outputs a hal float value in degrees.
This rotational value can be used by tangential knife machines to direct the knife in
the vector direction of the trajectory.
Today we added another feature to the scurve planner : tangential knife
The planner outputs a hal float value in degrees.
This rotational value can be used by tangential knife machines to direct the knife in
the vector direction of the trajectory.
Attachments:
The following user(s) said Thank You: akb1212, Clive S, HalaszAttila, wellingtoncsouza, DauntlessA, Rookie0
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4754
- Thank you received: 2134
28 Mar 2025 15:03 #325166
by Aciera
Replied by Aciera on topic scurve trajectory planner
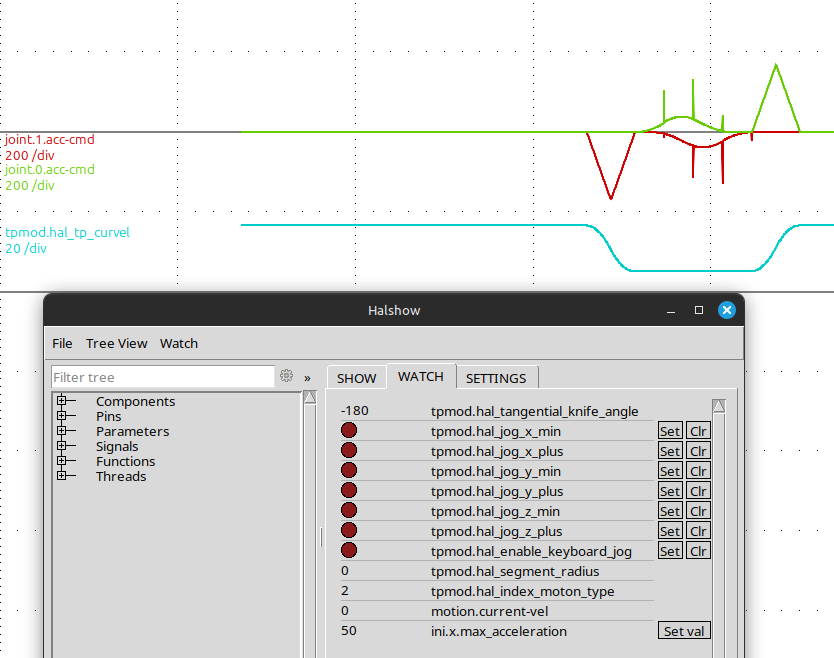
I did a quick test on my non-rt installation running 'cmake/nc_files/fillet/square_100x100_P5.ngc'.
1. it seems that inital deceleration and final acceleration along the fillet do not respect max_acceleration settings (50 for x in my case)
2. there seem to be acceleration spikes while traversing the fillet
Below is the captured accelerations for X and Y for the first corner of the rectangle:
1. it seems that inital deceleration and final acceleration along the fillet do not respect max_acceleration settings (50 for x in my case)
2. there seem to be acceleration spikes while traversing the fillet
Below is the captured accelerations for X and Y for the first corner of the rectangle:
Attachments:
Please Log in or Create an account to join the conversation.
Time to create page: 0.868 seconds