Problem bei installation Ethercat
- Sviper
- Offline
- Senior Member
-

Less
More
- Posts: 77
- Thank you received: 9
05 Nov 2021 14:46 - 05 Nov 2021 15:03 #225400
by Sviper
Replied by Sviper on topic Problem bei installation Ethercat
Hallo Columbus,
ich denke ich habe immer zu viel geklickt, aber anbei die 3 Schritte die ich immer so gemacht hab.
Ich hoffe euch stören die Bilder nicht. Wenn man sich in einem Programm einarbeitet findet man es doch so viel schneller.
Wenn ich denke wie lang ich nach dem Freerun Knopf gesucht habe") .
.
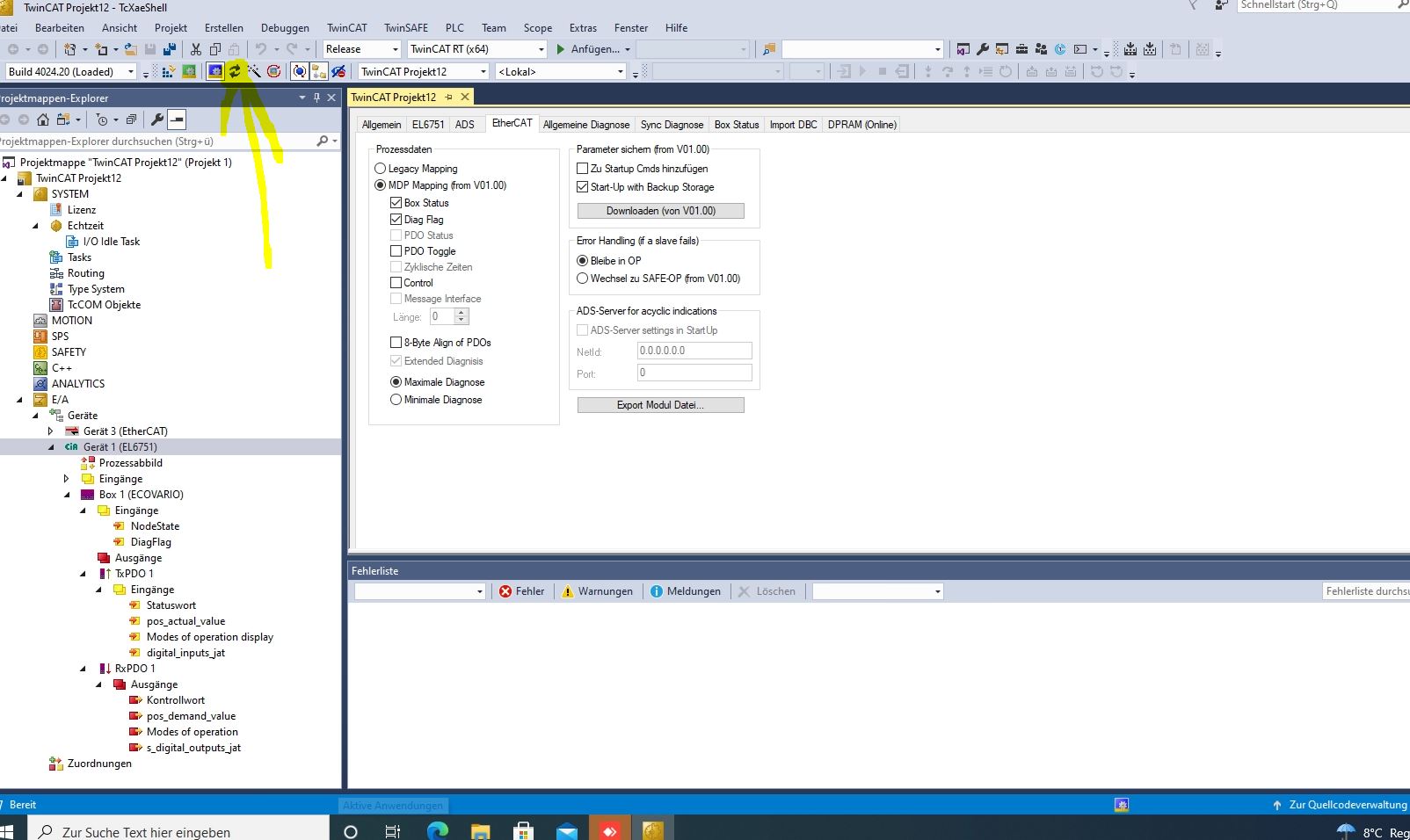
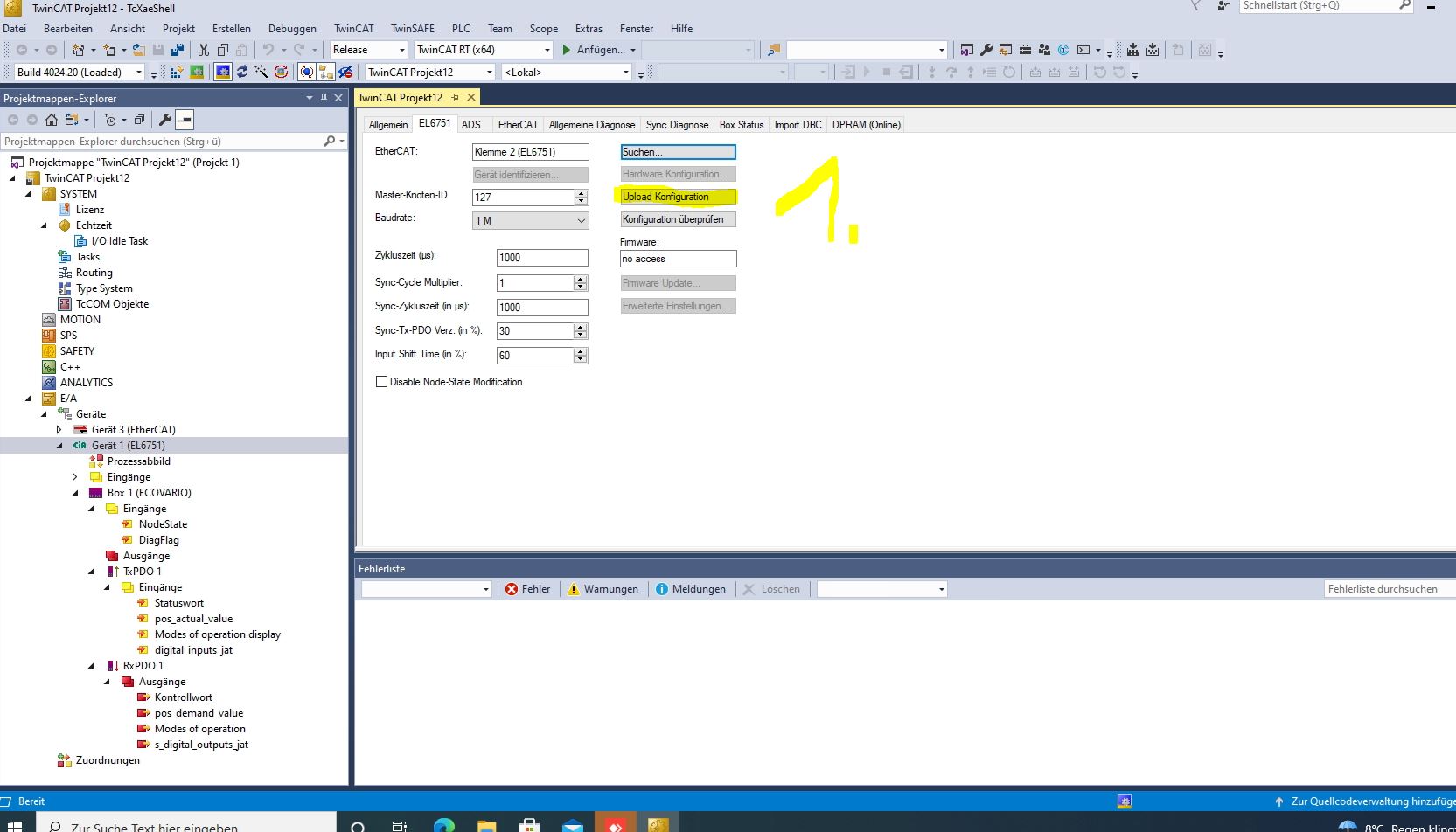
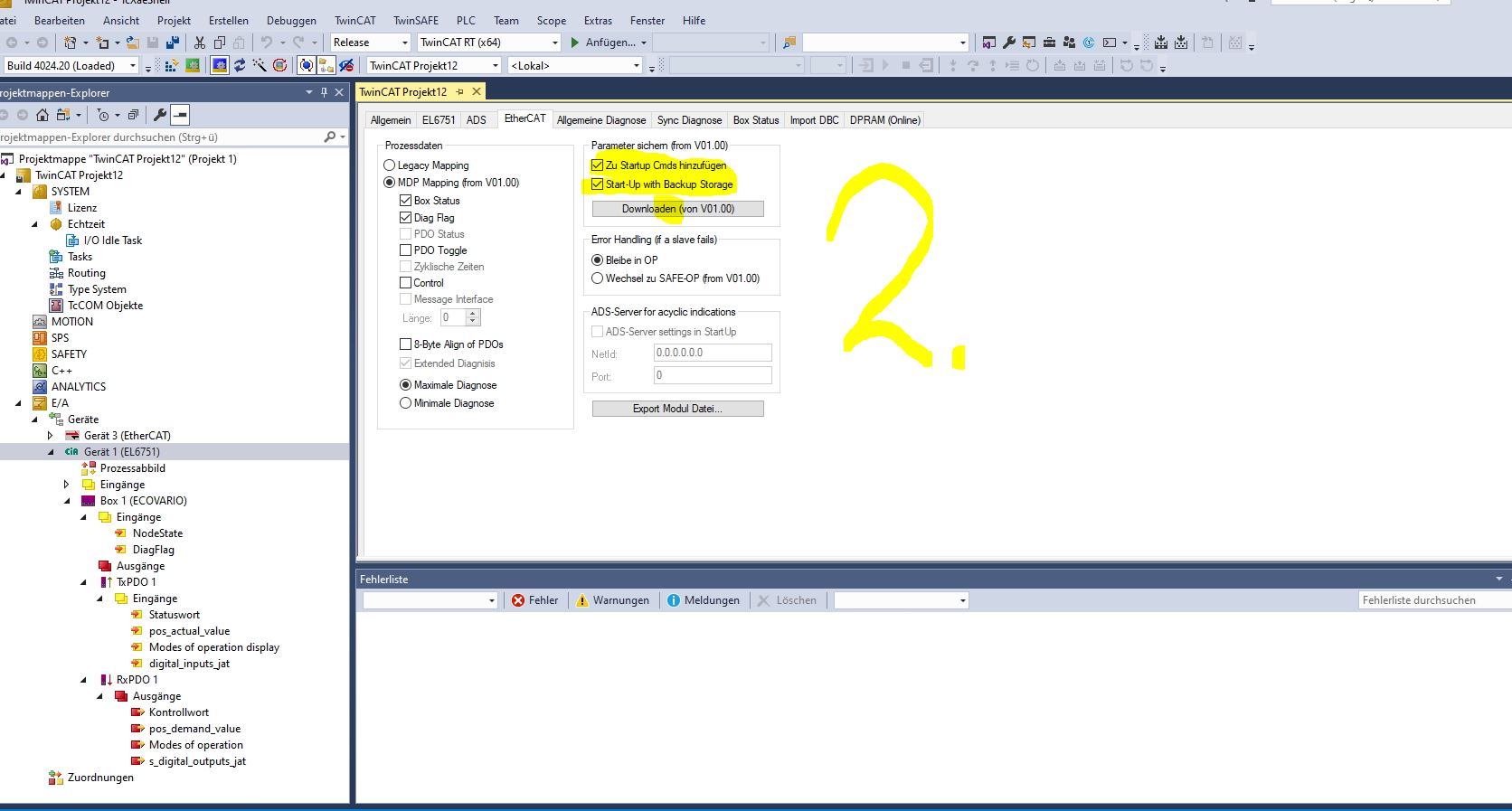
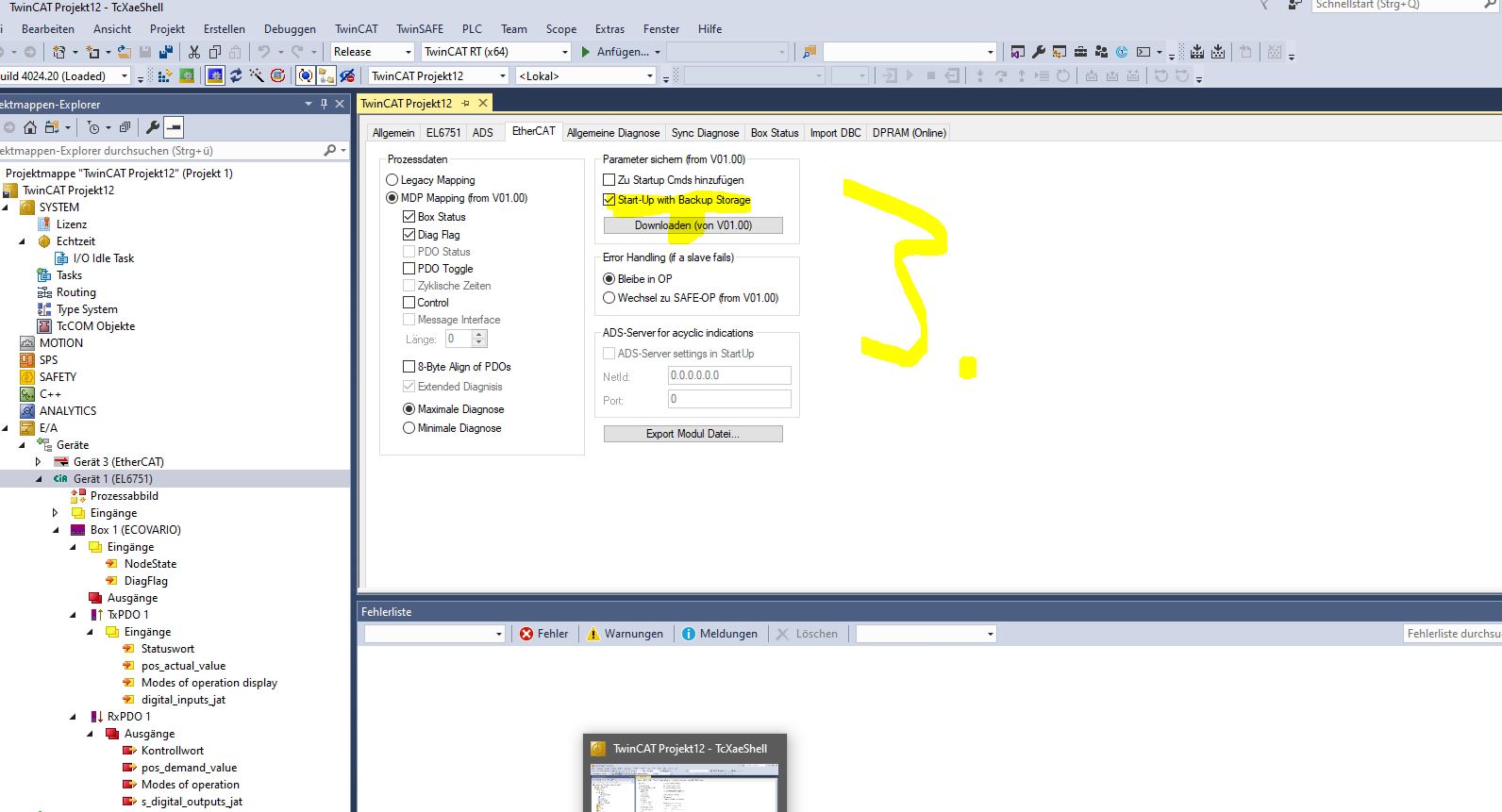
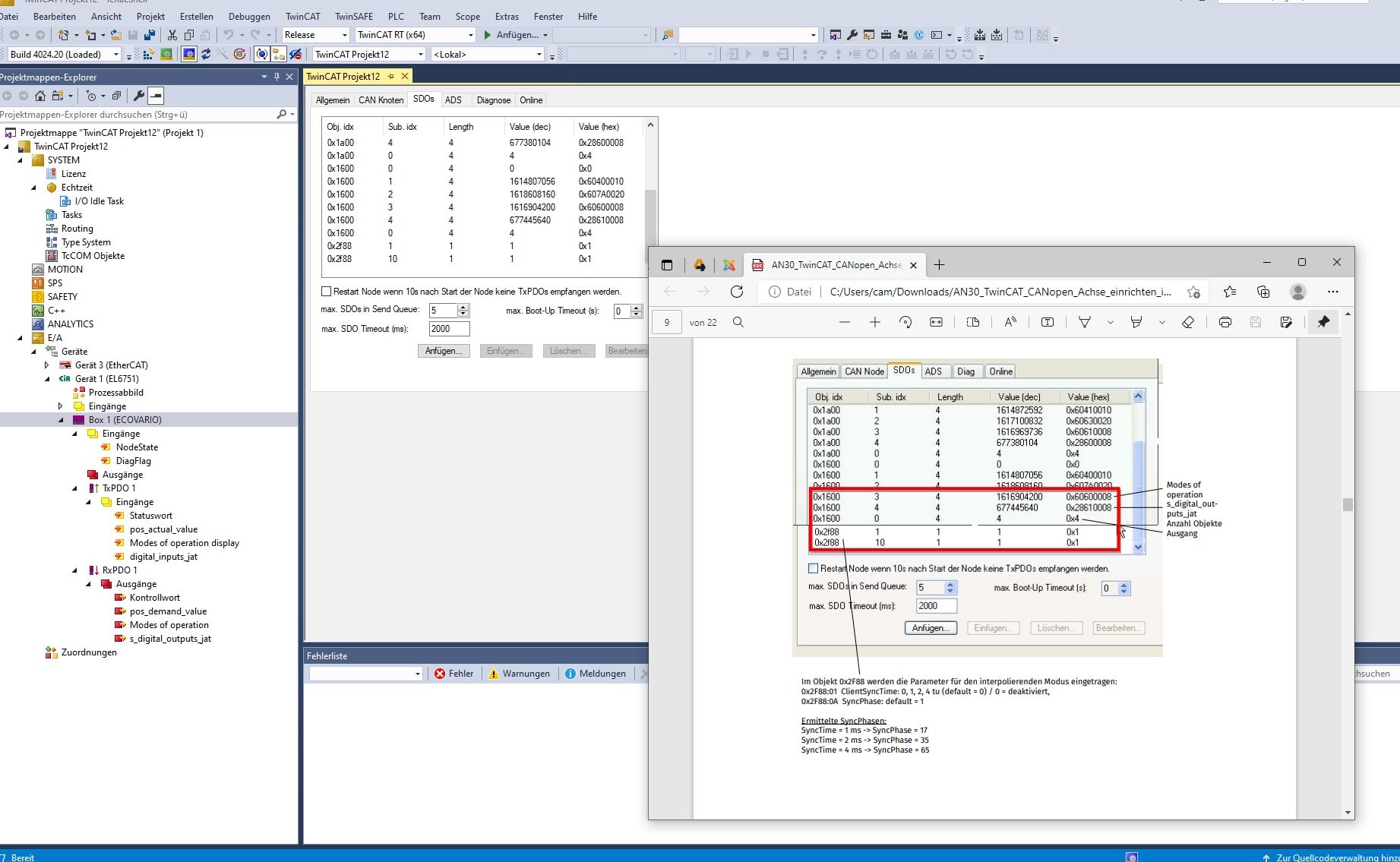
Als letztes noch die Sync Einstellungen, diese legen im Treiber die 1ms auf der Adresse 0x2f88 fest. Sub 01 ist die ms Einstellung also 1 = 1ms. der zweite Sub 10 die Verschiebung. Die brauchst du anscheined nicht bei LCNC da es ohne auf -1 läuft. Bei Codesys steht im hadbuch sollte Sie 65 betragen. Das trifft bei LCNC anscheinend nicht zu. Also so läuft es.
Welche Firmware hast du vom EL6751? du brauchst min 13 (ECATFW__EL6751_ET1100-13-V0099) !. Du solltest aber bei Beckhoff fragen ob deine dafür geht. Wenn deine SN höher ist wie meine, dann sollte die gehen. Kann ich dir ggf. zukommen lassen. LG
ich denke ich habe immer zu viel geklickt, aber anbei die 3 Schritte die ich immer so gemacht hab.
Ich hoffe euch stören die Bilder nicht. Wenn man sich in einem Programm einarbeitet findet man es doch so viel schneller.
Wenn ich denke wie lang ich nach dem Freerun Knopf gesucht habe
.
Als letztes noch die Sync Einstellungen, diese legen im Treiber die 1ms auf der Adresse 0x2f88 fest. Sub 01 ist die ms Einstellung also 1 = 1ms. der zweite Sub 10 die Verschiebung. Die brauchst du anscheined nicht bei LCNC da es ohne auf -1 läuft. Bei Codesys steht im hadbuch sollte Sie 65 betragen. Das trifft bei LCNC anscheinend nicht zu. Also so läuft es.
Welche Firmware hast du vom EL6751? du brauchst min 13 (ECATFW__EL6751_ET1100-13-V0099) !. Du solltest aber bei Beckhoff fragen ob deine dafür geht. Wenn deine SN höher ist wie meine, dann sollte die gehen. Kann ich dir ggf. zukommen lassen. LG
Attachments:
Last edit: 05 Nov 2021 15:03 by Sviper.
The following user(s) said Thank You: Tchefter, andrax, Columbo
Please Log in or Create an account to join the conversation.
- andrax
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 302
- Thank you received: 79
05 Nov 2021 17:10 #225413
by andrax
Replied by andrax on topic Problem bei installation Ethercat
Ich machs mal kurz und schmerzlos...
>Spitzegemacht<
>Spitzegemacht<
Please Log in or Create an account to join the conversation.
- Columbo
- Offline
- Senior Member
-
Less
More
- Posts: 53
- Thank you received: 0
05 Nov 2021 21:38 - 05 Nov 2021 21:41 #225435
by Columbo
Replied by Columbo on topic Problem bei installation Ethercat
Hallo,
nun bin ich soweit wie Sviper gestern Abend.
Oben gezeigtes Prozedere funktioniert bei mir auch und bringt die Klemme in OP im LCNC. Es blinkt trotzdem noch die Error LED im Sekundentakt.
Ich befürchte es kommt von nicht passenden Syncs. Komischerweise bleibt die Cycle time Anzeige im TC auf 4000 stehen, auch wenn ich es im 2F88:01 ändere.
Alles in allem trotzdem ein Fortschritt heute.
Morgen gehts weiter.
Danke
Grüße
Columbo
Achja.
nun bin ich soweit wie Sviper gestern Abend.
Oben gezeigtes Prozedere funktioniert bei mir auch und bringt die Klemme in OP im LCNC. Es blinkt trotzdem noch die Error LED im Sekundentakt.
Ich befürchte es kommt von nicht passenden Syncs. Komischerweise bleibt die Cycle time Anzeige im TC auf 4000 stehen, auch wenn ich es im 2F88:01 ändere.
Alles in allem trotzdem ein Fortschritt heute.
Morgen gehts weiter.
Danke
Grüße
Columbo
Achja.
Welche Firmware hast du vom EL6751? du brauchst min 13 (ECATFW__EL6751_ET1100-13-V0099) !. Du solltest aber bei Beckhoff fragen ob deine dafür geht. Wenn deine SN höher ist wie meine, dann sollte die gehen. Kann ich dir ggf. zukommen lassen. LG
Ursprünglich ist meine Klemme schweinealt und gebraucht mit FW12 gekauft. Beckhoff Support hat mir ein Firmwareupdate geschickt, was ich erfolgreich durchgeführt hab:
13-V0099...rein interessehalber möchte ich die Nummern gerne vergleichen.
Last edit: 05 Nov 2021 21:41 by Columbo.
Please Log in or Create an account to join the conversation.
- Sviper
- Offline
- Senior Member
-
Less
More
- Posts: 77
- Thank you received: 9
06 Nov 2021 07:36 #225481
by Sviper
Replied by Sviper on topic Problem bei installation Ethercat
Moin schalt den freerun Cycl auf 1ms el6157-> etherkat-> Adapter-> erweitert
Glaube so war das. Hat dp1981 etwas weiter vorne geschrieben. Und kontrolliere die Zeiten im TC. Die Bilder davon sind dann unter dem Post von db1981.
Und der servotreiber richtet sich nach dem Master. Gibt der die 4ms vor geht er auch auf 4ms egal was im Register steht. Glaube das war so. Bei den ganzen Versuchen verliert man den Überblick. Aber starte einfach mal komplett neu (Strom aus) und dann direkt an Lcnc wieder an. Wenn der einmal. Vom tc verkorkst ist läuft das immer mit der blinkenden Led.
Lg Steffen
Glaube so war das. Hat dp1981 etwas weiter vorne geschrieben. Und kontrolliere die Zeiten im TC. Die Bilder davon sind dann unter dem Post von db1981.
Und der servotreiber richtet sich nach dem Master. Gibt der die 4ms vor geht er auch auf 4ms egal was im Register steht. Glaube das war so. Bei den ganzen Versuchen verliert man den Überblick. Aber starte einfach mal komplett neu (Strom aus) und dann direkt an Lcnc wieder an. Wenn der einmal. Vom tc verkorkst ist läuft das immer mit der blinkenden Led.
Lg Steffen
The following user(s) said Thank You: Columbo
Please Log in or Create an account to join the conversation.
- Sviper
- Offline
- Senior Member
-
Less
More
- Posts: 77
- Thank you received: 9
08 Nov 2021 11:29 - 08 Nov 2021 11:53 #225665
by Sviper
Replied by Sviper on topic Problem bei installation Ethercat
Hallo Leute,
meine Maschine läuft derzeit mit folgenden Regelungen step/dir über Mesa 7i76e und für die 4 Achse Mesa 7i77 mit +-10V inkl. Encoder Rückführung bei einer FHC40A. Die Schrittmotoren habe ich zusätzlich auch noch über Encoder geregelt, da meine Maschine für die Schrittmotoren Grenzwertig sind und ich immer minimale Abweichungen hatte. Seit dem ich Encoder habe ist exakt und läuft super.
Hierbei ist mir die Reglung völlig klar.
Wie sollte ich jetzt bei den Ecovario weiter machen?
Positionsregler oder Geschwindigkeitsmodus?
Beim Positionsregler stellt sich mir die Frage wie er dann weiß welche Geschwindigkeit er lt. LCNC fahren soll.
Beim Geschwindigkeitsregler müsste dann die PID Regelung LCNC übernehmen. Das wäre ja dann wie die +-10V Variante. Oder?
Hat jemand mal ein hal Beispiel für die beiden Varianten auf Ethercat-Basis?
meine Maschine läuft derzeit mit folgenden Regelungen step/dir über Mesa 7i76e und für die 4 Achse Mesa 7i77 mit +-10V inkl. Encoder Rückführung bei einer FHC40A. Die Schrittmotoren habe ich zusätzlich auch noch über Encoder geregelt, da meine Maschine für die Schrittmotoren Grenzwertig sind und ich immer minimale Abweichungen hatte. Seit dem ich Encoder habe ist exakt und läuft super.
Hierbei ist mir die Reglung völlig klar.
Wie sollte ich jetzt bei den Ecovario weiter machen?
Positionsregler oder Geschwindigkeitsmodus?
Beim Positionsregler stellt sich mir die Frage wie er dann weiß welche Geschwindigkeit er lt. LCNC fahren soll.
Beim Geschwindigkeitsregler müsste dann die PID Regelung LCNC übernehmen. Das wäre ja dann wie die +-10V Variante. Oder?
Hat jemand mal ein hal Beispiel für die beiden Varianten auf Ethercat-Basis?
Last edit: 08 Nov 2021 11:53 by Sviper.
Please Log in or Create an account to join the conversation.
- Columbo
- Offline
- Senior Member
-
Less
More
- Posts: 53
- Thank you received: 0
08 Nov 2021 19:00 #225709
by Columbo
Replied by Columbo on topic Problem bei installation Ethercat
Hallo an alle,
ohne Svipers Frage in den Hintergrund stellen zu wollen, einige Neuigkeiten von mir:
Die Klemme geht mit 1ms Zykluszeit in LCNC in OP und bleibt grün (ohne rotes Geflacker). Encoderpositionen trudeln im HALMeter wunderbar rein und auch das Statuswort wird am entsprechenden Pin angezeigt.
Wie es nun weitergeht weiß ich noch nicht. Sicherlich spiele ich in den nächsten Tagen mit den HAL Sachen rum und belese mich mal darüber, wie die HAL-Konfig aussehen muss.
Vielleicht doch was zu Svipers Frage:
Meiner Ansicht nach wird Stromregler, Geschwindigkeitsregler und Lageregler im Verstärker eingestellt und der Verstärker in Betriebsart 7 gesetzt. Dann werden in der gewählten Zykluszeit neue Sollpositionen an den Verstärker geschickt, der die dann unmittelbar anfährt.
....so hab ichs mir bisher vorgestellt.
Grüße
Columbo
ohne Svipers Frage in den Hintergrund stellen zu wollen, einige Neuigkeiten von mir:
Die Klemme geht mit 1ms Zykluszeit in LCNC in OP und bleibt grün (ohne rotes Geflacker). Encoderpositionen trudeln im HALMeter wunderbar rein und auch das Statuswort wird am entsprechenden Pin angezeigt.
Wie es nun weitergeht weiß ich noch nicht. Sicherlich spiele ich in den nächsten Tagen mit den HAL Sachen rum und belese mich mal darüber, wie die HAL-Konfig aussehen muss.
Vielleicht doch was zu Svipers Frage:
Meiner Ansicht nach wird Stromregler, Geschwindigkeitsregler und Lageregler im Verstärker eingestellt und der Verstärker in Betriebsart 7 gesetzt. Dann werden in der gewählten Zykluszeit neue Sollpositionen an den Verstärker geschickt, der die dann unmittelbar anfährt.
....so hab ichs mir bisher vorgestellt.
Grüße
Columbo
Please Log in or Create an account to join the conversation.
- hozte
- Offline
- New Member
-

Less
More
- Posts: 16
- Thank you received: 2
08 Nov 2021 20:07 - 08 Nov 2021 20:07 #225720
by hozte
Replied by hozte on topic Problem bei installation Ethercat
Hallo,
wenn der Motorregler Betriebsart 7 kann, würde ich immer diesen nehmen. Meist wird dann intern noch einmal interpoliert und der Lageregler im Servotreiber läuft mit einer höheren Zykluszeit als 1ms.
In der .hal musst du dann die state machine der Motorregler bedienen. Hier ein Beispiel für die X-Achse
# STATEMACHINE X-Achse
net EnableAmpX joint.0.amp-enable-out => lcec.0.3.X-cmd-/QuickStop
net EnableAmpX lcec.0.3.X-cmd-EnableVoltage
net X-StatusReadytoSwitchOn <= lcec.0.3.X-stat-ReadyToSwitchOn
net X-StatusReadytoSwitchOn lcec.0.3.X-cmd-SwitchOn
net X-StatusSwitchOn <= lcec.0.3.X-stat-SwitchOn
net X-StatusSwitchOn lcec.0.3.X-cmd-EnableOperation
net X-StatusOperationEnable <= lcec.0.3.X-stat-OperationEnable
net X-StatusOperationEnable => lcec.0.3.X-cmd-EnableIPMode # müsste besser Enable IP Mode heißen
net X-Antriebsfehler lcec.0.3.X-stat-Fault => joint.0.amp-fault-in #Fehlermeldung anzeigen
net X-Antriebsfehler => lcec.0.3.X-cmd-FaultReset #bei Neustart Fehler quittieren
Viele Grüße
Matthias
wenn der Motorregler Betriebsart 7 kann, würde ich immer diesen nehmen. Meist wird dann intern noch einmal interpoliert und der Lageregler im Servotreiber läuft mit einer höheren Zykluszeit als 1ms.
In der .hal musst du dann die state machine der Motorregler bedienen. Hier ein Beispiel für die X-Achse
# STATEMACHINE X-Achse
net EnableAmpX joint.0.amp-enable-out => lcec.0.3.X-cmd-/QuickStop
net EnableAmpX lcec.0.3.X-cmd-EnableVoltage
net X-StatusReadytoSwitchOn <= lcec.0.3.X-stat-ReadyToSwitchOn
net X-StatusReadytoSwitchOn lcec.0.3.X-cmd-SwitchOn
net X-StatusSwitchOn <= lcec.0.3.X-stat-SwitchOn
net X-StatusSwitchOn lcec.0.3.X-cmd-EnableOperation
net X-StatusOperationEnable <= lcec.0.3.X-stat-OperationEnable
net X-StatusOperationEnable => lcec.0.3.X-cmd-EnableIPMode # müsste besser Enable IP Mode heißen
net X-Antriebsfehler lcec.0.3.X-stat-Fault => joint.0.amp-fault-in #Fehlermeldung anzeigen
net X-Antriebsfehler => lcec.0.3.X-cmd-FaultReset #bei Neustart Fehler quittieren
Viele Grüße
Matthias
Last edit: 08 Nov 2021 20:07 by hozte.
Please Log in or Create an account to join the conversation.
- Sviper
- Offline
- Senior Member
-
Less
More
- Posts: 77
- Thank you received: 9
09 Nov 2021 06:31 - 09 Nov 2021 06:34 #225781
by Sviper
Replied by Sviper on topic Problem bei installation Ethercat
Hallo Leute,
super danke das ist doch mal ein Ansatz.
Ich werde nun die XML umbauen um an die Pins vom Steuerwort zu kommen.
Hier: github.com/sittner/linuxcnc-ethercat/blo.../ethercat-conf_X.xml
ist zufällig genau der Aufbau unsere Steuerwort aufgeschlüsselt. Das sollte gehen.
Kann mir bitte einer mal genau den Aufbau folgender SDO erklären Bsp: 0x6040:
<!-- 0x6040 Commandregister 0x0080-->
<sdoDataRaw data="40 60 00 02 00 80 00"/>
Meine Interpretation
40 60 --> ist gleich 0x6040
00 -> Sub 00 Richtig?
Nun sollte ein Byte kommen Richtig also 8 Bit (Stellen)
02 --> keine Ahnung
00 --> keine Ahnung
80 --> lt. Handbuch Fehler löschen
00---> keine Ahnung
<!-- 0x6040 Commandregister 0x000F-->
<sdoDataRaw data="40 60 00 02 00 0F 00"/>
Meine Interpretation
40 60 --> ist gleich 0x6040
00 -> Sub 00 Richtig?
Nun sollte ein Byte kommen Richtig also 8 Bit (Stellen)
02 --> keine Ahnung
00 --> keine Ahnung
0F --> lt. Handbuch: Antriebsregler (Endstufe) ein
00---> keine Ahnung Kann mir einer die anderen Bit erklären!?
Die Beschreibung des 0x6040 habe ich als Bild abgelegt.
Danke Leute
super danke das ist doch mal ein Ansatz.
Ich werde nun die XML umbauen um an die Pins vom Steuerwort zu kommen.
Hier: github.com/sittner/linuxcnc-ethercat/blo.../ethercat-conf_X.xml
ist zufällig genau der Aufbau unsere Steuerwort aufgeschlüsselt. Das sollte gehen.
Kann mir bitte einer mal genau den Aufbau folgender SDO erklären Bsp: 0x6040:
<!-- 0x6040 Commandregister 0x0080-->
<sdoDataRaw data="40 60 00 02 00 80 00"/>
Meine Interpretation
40 60 --> ist gleich 0x6040
00 -> Sub 00 Richtig?
Nun sollte ein Byte kommen Richtig also 8 Bit (Stellen)
02 --> keine Ahnung
00 --> keine Ahnung
80 --> lt. Handbuch Fehler löschen
00---> keine Ahnung
<!-- 0x6040 Commandregister 0x000F-->
<sdoDataRaw data="40 60 00 02 00 0F 00"/>
Meine Interpretation
40 60 --> ist gleich 0x6040
00 -> Sub 00 Richtig?
Nun sollte ein Byte kommen Richtig also 8 Bit (Stellen)
02 --> keine Ahnung
00 --> keine Ahnung
0F --> lt. Handbuch: Antriebsregler (Endstufe) ein
00---> keine Ahnung Kann mir einer die anderen Bit erklären!?
Die Beschreibung des 0x6040 habe ich als Bild abgelegt.
Danke Leute
Last edit: 09 Nov 2021 06:34 by Sviper.
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-

Less
More
- Posts: 790
- Thank you received: 276
09 Nov 2021 08:49 #225789
by db1981
Replied by db1981 on topic Problem bei installation Ethercat
Hallo,
wenn ihr Cyclic Syncron Positon Mode (8) oder interpolated (7) macht, wird die
geschwindigkeit aus den zyklischen Positionsänderungen übernommen.
Wichtig ist das im Servo Regler selber keine Rampen parametriert sind, die Sollwertgenerierung kommt dann komplett vom Lcnc Motion teil.
Weiter, solltet ihr unbedingt Distiributed Clocks einbauen für die CAn Klemme, damit die Regler später auch alle zum gleichen Zeitpunkt ihre Soll Positionen bekommen. Ansonsten könnte das Verschliff in der Bahn geben....
Bzgl. Steuerwort / Statuswort etc. könnt ihr euch ja einmal mein DS402 Interface anschauen, dort wird das alles gehandelt und auf die Lcnc üblichen Pins übersetzt inkl. Encoderbehandlung mit Scaling, Überlauf etc..
github.com/dbraun1981/hal-cia402
wenn ihr Cyclic Syncron Positon Mode (8) oder interpolated (7) macht, wird die
geschwindigkeit aus den zyklischen Positionsänderungen übernommen.
Wichtig ist das im Servo Regler selber keine Rampen parametriert sind, die Sollwertgenerierung kommt dann komplett vom Lcnc Motion teil.
Weiter, solltet ihr unbedingt Distiributed Clocks einbauen für die CAn Klemme, damit die Regler später auch alle zum gleichen Zeitpunkt ihre Soll Positionen bekommen. Ansonsten könnte das Verschliff in der Bahn geben....
Bzgl. Steuerwort / Statuswort etc. könnt ihr euch ja einmal mein DS402 Interface anschauen, dort wird das alles gehandelt und auf die Lcnc üblichen Pins übersetzt inkl. Encoderbehandlung mit Scaling, Überlauf etc..
github.com/dbraun1981/hal-cia402
Please Log in or Create an account to join the conversation.
- hozte
- Offline
- New Member
-
Less
More
- Posts: 16
- Thank you received: 2
09 Nov 2021 09:52 - 09 Nov 2021 09:53 #225795
by hozte
Replied by hozte on topic Problem bei installation Ethercat
Hi,
du hast das schon richtig erkannt!
4060 -> Objekt 6040
00 -> Subindex 0
02 -> Anzahl gültiger Bytes
00 0F -> gültige Datenbytes bzw. Daten (Antriebsregler ein)
00 -> keine Ahnung, da müsste man sich mal den SDO Transfer im Detail anschauen!?
Er schaltet daurch direkt den Antriebsregler ein.
In dieser .xml ist der Antrieb in "Profiled Position Mode" das heißt der Mode of operation (0x6060) ist 1.
Ich weiß nicht welchen operation mode du verwendest, würde aber wenn es der Antriebsregler kann den interpolated position mode benutzen (0x6060 = 7).
Gruß Matthias
du hast das schon richtig erkannt!
4060 -> Objekt 6040
00 -> Subindex 0
02 -> Anzahl gültiger Bytes
00 0F -> gültige Datenbytes bzw. Daten (Antriebsregler ein)
00 -> keine Ahnung, da müsste man sich mal den SDO Transfer im Detail anschauen!?
Er schaltet daurch direkt den Antriebsregler ein.
In dieser .xml ist der Antrieb in "Profiled Position Mode" das heißt der Mode of operation (0x6060) ist 1.
Ich weiß nicht welchen operation mode du verwendest, würde aber wenn es der Antriebsregler kann den interpolated position mode benutzen (0x6060 = 7).
Gruß Matthias
Last edit: 09 Nov 2021 09:53 by hozte.
Please Log in or Create an account to join the conversation.
Moderators: Muecke
Time to create page: 0.271 seconds