Ethercat random jitter fix
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 11986
- Thank you received: 4083
11 Apr 2026 21:28 #345427
by rodw
Replied by rodw on topic Ethercat random jitter fix
Thought I'd ask here. User has upgraded from Debian 10 to latest Debian 13.3 and 2.10pre RIP config. Now Running grandixximos Ethercat driver but have not set syncToRefClock yet.
He reports:
With the same xml file, i/o and drive configuration, Debian 10 kernel 4.19 with ethercat 1.5.2 works fine, it has no latency at boot and hasn't given any problems. The current system has kernel 6.12 with ethercat 1.6.9 and has synchronization problems at boot, sometimes it doesn't see some drives on the bus, I'm forced to turn it off and on again. Would it be possible to use the current 6.12 kernel and linuxcnc 2.10, with ethercat 1.5.2?
I copied the lcec_conf and lcec.so files into the respective bin and rtailib folders from the Debian 10 version that I have and which works well on my machines, with linuxcnc 2.9.0 pre1 and etherrcat 1.5.2. At boot time, the drives are now seen within 1-2 seconds of booting and are always found on the bus.
This has 5 axis servos and a few Beckhoff modules attached to EK1100
Next step is to add syncToRefClock
It seems odd to me that today's Ethercat hal driver is not performing but rolling back to an older version of it works. It seems to me his problem is the driver, not the version of Ethercat.
Any ideas or advice?
He reports:
With the same xml file, i/o and drive configuration, Debian 10 kernel 4.19 with ethercat 1.5.2 works fine, it has no latency at boot and hasn't given any problems. The current system has kernel 6.12 with ethercat 1.6.9 and has synchronization problems at boot, sometimes it doesn't see some drives on the bus, I'm forced to turn it off and on again. Would it be possible to use the current 6.12 kernel and linuxcnc 2.10, with ethercat 1.5.2?
I copied the lcec_conf and lcec.so files into the respective bin and rtailib folders from the Debian 10 version that I have and which works well on my machines, with linuxcnc 2.9.0 pre1 and etherrcat 1.5.2. At boot time, the drives are now seen within 1-2 seconds of booting and are always found on the bus.
This has 5 axis servos and a few Beckhoff modules attached to EK1100
Next step is to add syncToRefClock
It seems odd to me that today's Ethercat hal driver is not performing but rolling back to an older version of it works. It seems to me his problem is the driver, not the version of Ethercat.
Any ideas or advice?
Please Log in or Create an account to join the conversation.
- grandixximo
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 307
- Thank you received: 367
12 Apr 2026 00:03 - 12 Apr 2026 00:13 #345429
by grandixximo
Replied by grandixximo on topic Ethercat random jitter fix
Ethercat 1.6.8 is the previous stable release, have you tried that? 1.6.9 is a bit new I think, maybe they changed something?
Do you have the code for lcec version that works on your debian 10? Can you share the .so ?
Do you have the code for lcec version that works on your debian 10? Can you share the .so ?
Last edit: 12 Apr 2026 00:13 by grandixximo.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11986
- Thank you received: 4083
12 Apr 2026 01:10 #345430
by rodw
Replied by rodw on topic Ethercat random jitter fix
1.69 was released two weeks ago. Its what you get from their repos with a current version of Debian Trixie.
gitlab.com/groups/etherlab.org/-/packages
The code should be here.
gitlab.com/etherlab.org/ethercat/-/tree/1.5.2?ref_type=tags
From 2013. wow! that's old! From that, I would think it was built from source from Sourceforge. But well before my involvement.
Just checking Etherlab's gitlab releases, the first version on gitlab repo was 1.53 in 2024 so must be from Sourceforge
From what I can see, its not an Ethercat issue because the Debian 10 version of linuxcnc-ethercat (with Ethercat 1,52) works with no problems on Debian 13.3 with Ethercat 1.69.
gitlab.com/groups/etherlab.org/-/packages
The code should be here.
gitlab.com/etherlab.org/ethercat/-/tree/1.5.2?ref_type=tags
From 2013. wow! that's old! From that, I would think it was built from source from Sourceforge. But well before my involvement.
Just checking Etherlab's gitlab releases, the first version on gitlab repo was 1.53 in 2024 so must be from Sourceforge
From what I can see, its not an Ethercat issue because the Debian 10 version of linuxcnc-ethercat (with Ethercat 1,52) works with no problems on Debian 13.3 with Ethercat 1.69.
Please Log in or Create an account to join the conversation.
- grandixximo
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 307
- Thank you received: 367
12 Apr 2026 05:35 - 12 Apr 2026 05:36 #345433
by grandixximo
Replied by grandixximo on topic Ethercat random jitter fix
Yes sorry, because your post was a bit all over the place.
about ethercat master, 1.6.9 is pretty new, so I was asking to double check with 1.6.8
But I agree linuxcnc-ethercat seems to be the issue, so I was asking about the code for lcec aka linuxcnc-ethercat
You moved the lcec_conf and lcec.so
But do you have the code for the linuxcnc-ethercat that works? or can you at least share approximately where this working version could have come from? Without that, it is really hard to understand what is happening, and get to the bottom of it.
about ethercat master, 1.6.9 is pretty new, so I was asking to double check with 1.6.8
But I agree linuxcnc-ethercat seems to be the issue, so I was asking about the code for lcec aka linuxcnc-ethercat
You moved the lcec_conf and lcec.so
But do you have the code for the linuxcnc-ethercat that works? or can you at least share approximately where this working version could have come from? Without that, it is really hard to understand what is happening, and get to the bottom of it.
Last edit: 12 Apr 2026 05:36 by grandixximo.
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
12 Apr 2026 07:12 - 12 Apr 2026 07:13 #345436
by Hakan
Replied by Hakan on topic Ethercat random jitter fix
It would be helpful to see the messages in syslog from when there was a problem.
from 5 April as an example. And cut to a reasonable length.
journalctl --since=2026-4-5 | grep EtherCAT from 5 April as an example. And cut to a reasonable length.
Last edit: 12 Apr 2026 07:13 by Hakan.
Please Log in or Create an account to join the conversation.
- endian
-

- Offline
- Platinum Member
-
Less
More
- Posts: 336
- Thank you received: 132
12 Apr 2026 08:52 #345437
by endian
but it is sometimes odd till todays that with some hardware at bus ethercat is self-restarting and with some hardware is not ... and therefore bus has no slave active
Ive not found solution at this till now...
Replied by endian on topic Ethercat random jitter fix
Ive experience of this non recognizing slaves on the bus during some experimenting at my debian 12 + 6.xx kernel ... but everything was solved by using non generic drivers and restarting ethercat service ifself... back that time I have benn using the 1.5.2 ethercat ...Thought I'd ask here. User has upgraded from Debian 10 to latest Debian 13.3 and 2.10pre RIP config. Now Running grandixximos Ethercat driver but have not set syncToRefClock yet.
He reports:
With the same xml file, i/o and drive configuration, Debian 10 kernel 4.19 with ethercat 1.5.2 works fine, it has no latency at boot and hasn't given any problems. The current system has kernel 6.12 with ethercat 1.6.9 and has synchronization problems at boot, sometimes it doesn't see some drives on the bus, I'm forced to turn it off and on again. Would it be possible to use the current 6.12 kernel and linuxcnc 2.10, with ethercat 1.5.2?
I copied the lcec_conf and lcec.so files into the respective bin and rtailib folders from the Debian 10 version that I have and which works well on my machines, with linuxcnc 2.9.0 pre1 and etherrcat 1.5.2. At boot time, the drives are now seen within 1-2 seconds of booting and are always found on the bus.
This has 5 axis servos and a few Beckhoff modules attached to EK1100
Next step is to add syncToRefClock
It seems odd to me that today's Ethercat hal driver is not performing but rolling back to an older version of it works. It seems to me his problem is the driver, not the version of Ethercat.
Any ideas or advice?
but it is sometimes odd till todays that with some hardware at bus ethercat is self-restarting and with some hardware is not ... and therefore bus has no slave active
Ive not found solution at this till now...
The following user(s) said Thank You: rodw
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11986
- Thank you received: 4083
12 Apr 2026 09:49 #345438
by rodw
Replied by rodw on topic Ethercat random jitter fix
Thanks for ideas.
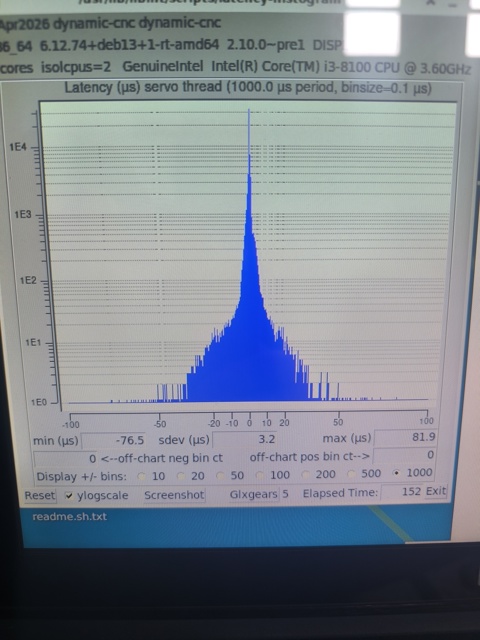
It gets worse and I've been pondering the next step.: "The machine is unusable; the axes shake and make a lot of noise. I tried rebooting and changing the refclock settings from -1 to values of 1 or 1000, but to no avail. The PC has an Intel NIC, but, as I said, the hardware and software are identical to Debian 10. At this point, I don't know what to do. The problem is EtherCAT."
The customer would like to try Ethercat 1.52 from his Debian 10 days but I don't think it will run on later kernels
The current Debian 10 Ethercat version on their repos is 1.62, Debian 12 and Debian 13 is 1.69 with no other earlier versions published. Latency is OK but not great for a 4 core machine
The only thing I can think of is to roll back to Debian 12. Any other ideas?
It gets worse and I've been pondering the next step.: "The machine is unusable; the axes shake and make a lot of noise. I tried rebooting and changing the refclock settings from -1 to values of 1 or 1000, but to no avail. The PC has an Intel NIC, but, as I said, the hardware and software are identical to Debian 10. At this point, I don't know what to do. The problem is EtherCAT."
The customer would like to try Ethercat 1.52 from his Debian 10 days but I don't think it will run on later kernels
The current Debian 10 Ethercat version on their repos is 1.62, Debian 12 and Debian 13 is 1.69 with no other earlier versions published. Latency is OK but not great for a 4 core machine
The only thing I can think of is to roll back to Debian 12. Any other ideas?
Attachments:
Please Log in or Create an account to join the conversation.
- papagno-source
- Offline
- Elite Member
-
Less
More
- Posts: 170
- Thank you received: 13
12 Apr 2026 12:38 - 12 Apr 2026 12:38 #345444
by papagno-source
Replied by papagno-source on topic Ethercat random jitter fix
Good morning everyone. We're running some tests with Rodw on a Debian Trixie system, kernel 6.12.74-rt, and ethercat 1.6.9.
Just to be fair, we're using the same configuration on real machines, so motors connected to lead screws, running Debian 10, kernel 4.19.0-27-rt, ethercat 1.5.2, and linuxcnc 2.9.0-pre1. So, with Debian 10, the machines work without problems. When I first start up, the drives and all ethercat I/O are immediately visible, meaning, for example, the positions of the absolute encoders for the motors appear instantly upon startup.
With Debian Trixie, we're having two problems. A less serious one, that is, at startup, the motor encoders' values appear late, the first drive starting to appear after about a second (x axis), after another second Y appears and after that Z appears. But the most serious problem is that if you run the machine, the axes shake, then they stop shaking, then the vibration comes back and everything gets worse if I move windows on the desktop. Rodw has already attached the latency test on the matter, but I repeat, the PC is always the same and all the i/o and xml files are the same. Now I tried to copy from Debian 10 the bin/lcec_conf and rtlib/lcec.so files into the respective directories of Debian Trixie, without result, same problem. We tried to copy the same files from a version with the Grandixxximo patch, same problem, I also tried to vary the lcec.0.pll-drift pin, with values from 10 to 1000 without solving. Honestly, I don't I know what to do. I'm attaching the XML files I use on Debian 10 and Trixie.
Just to be fair, we're using the same configuration on real machines, so motors connected to lead screws, running Debian 10, kernel 4.19.0-27-rt, ethercat 1.5.2, and linuxcnc 2.9.0-pre1. So, with Debian 10, the machines work without problems. When I first start up, the drives and all ethercat I/O are immediately visible, meaning, for example, the positions of the absolute encoders for the motors appear instantly upon startup.
With Debian Trixie, we're having two problems. A less serious one, that is, at startup, the motor encoders' values appear late, the first drive starting to appear after about a second (x axis), after another second Y appears and after that Z appears. But the most serious problem is that if you run the machine, the axes shake, then they stop shaking, then the vibration comes back and everything gets worse if I move windows on the desktop. Rodw has already attached the latency test on the matter, but I repeat, the PC is always the same and all the i/o and xml files are the same. Now I tried to copy from Debian 10 the bin/lcec_conf and rtlib/lcec.so files into the respective directories of Debian Trixie, without result, same problem. We tried to copy the same files from a version with the Grandixxximo patch, same problem, I also tried to vary the lcec.0.pll-drift pin, with values from 10 to 1000 without solving. Honestly, I don't I know what to do. I'm attaching the XML files I use on Debian 10 and Trixie.
Last edit: 12 Apr 2026 12:38 by papagno-source.
Please Log in or Create an account to join the conversation.
- papagno-source
- Offline
- Elite Member
-
Less
More
- Posts: 170
- Thank you received: 13
12 Apr 2026 12:41 - 12 Apr 2026 14:07 #345445
by papagno-source
Replied by papagno-source on topic Ethercat random jitter fix
xml debian 10
<masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="-1">
<slave idx="0" type="generic" vid="0000022b" pid="0531ec01" configPdos="true">
<sdoConfig idx="3103" subIdx="08">
<sdoDataRaw data="16"/>
</sdoConfig>
<sdoConfig idx="3104" subIdx="08">
<sdoDataRaw data="16"/>
</sdoConfig>
<sdoConfig idx="3103" subIdx="09">
<sdoDataRaw data="03"/>
</sdoConfig>
<sdoConfig idx="3104" subIdx="09">
<sdoDataRaw data="01"/>
</sdoConfig>
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="7001" subIdx="01" bitLen="8" halPin="out_veloci" halType="bit"/>
<pdoEntry idx="7002" subIdx="01" bitLen="16" halPin="ao0" halType="float" scale="2765"/>
<pdoEntry idx="7002" subIdx="02" bitLen="16" halPin="ao1" halType="float" scale="2765"/>
<pdoEntry idx="7003" subIdx="01" bitLen="32" halPin="comparation_value" halType="float" scale="1"/>
<pdoEntry idx="7003" subIdx="02" bitLen="32" halPin="setvalue" halType="float" scale="1"/>
<pdoEntry idx="7003" subIdx="03" bitLen="16" halPin="control_word" halType="bit"/>
<pdoEntry idx="7004" subIdx="01" bitLen="32" halPin="comparation_valuev" halType="float" scale="1"/>
<pdoEntry idx="7004" subIdx="02" bitLen="32" halPin="setvaluev" halType="float" scale="1"/>
<pdoEntry idx="7004" subIdx="03" bitLen="16" halPin="control_wordv" halType="bit"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6000" subIdx="01" bitLen="8" halPin="in_veloci" halType="bit"/>
<pdoEntry idx="6003" subIdx="01" bitLen="32" halPin="counter_value" halType="float" scale="1"/>
<pdoEntry idx="6003" subIdx="02" bitLen="16" halPin="counter_status" halType="bit"/>
<pdoEntry idx="6003" subIdx="03" bitLen="16" halPin="microsecond" halType="S32"/>
<pdoEntry idx="6004" subIdx="01" bitLen="32" halPin="counter_valuev" halType="float" scale="1"/>
<pdoEntry idx="6004" subIdx="02" bitLen="16" halPin="counter_statusv" halType="bit"/>
<pdoEntry idx="6004" subIdx="03" bitLen="16" halPin="microsecondv" halType="S32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE X -->
<slave idx="1" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000078125 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE Y -->
<slave idx="2" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE Z -->
<slave idx="3" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI SP -->
<slave idx="4" type="generic" vid="01dd" pid="10400140" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6042" subIdx="00" bitLen="16" halPin="cmdvel" halType="float"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE A -->
<slave idx="5" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE B -->
<slave idx="6" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE C -->
<slave idx="7" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
</master>
</masters>
Warning: Spoiler!
<masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="-1">
<slave idx="0" type="generic" vid="0000022b" pid="0531ec01" configPdos="true">
<sdoConfig idx="3103" subIdx="08">
<sdoDataRaw data="16"/>
</sdoConfig>
<sdoConfig idx="3104" subIdx="08">
<sdoDataRaw data="16"/>
</sdoConfig>
<sdoConfig idx="3103" subIdx="09">
<sdoDataRaw data="03"/>
</sdoConfig>
<sdoConfig idx="3104" subIdx="09">
<sdoDataRaw data="01"/>
</sdoConfig>
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="7001" subIdx="01" bitLen="8" halPin="out_veloci" halType="bit"/>
<pdoEntry idx="7002" subIdx="01" bitLen="16" halPin="ao0" halType="float" scale="2765"/>
<pdoEntry idx="7002" subIdx="02" bitLen="16" halPin="ao1" halType="float" scale="2765"/>
<pdoEntry idx="7003" subIdx="01" bitLen="32" halPin="comparation_value" halType="float" scale="1"/>
<pdoEntry idx="7003" subIdx="02" bitLen="32" halPin="setvalue" halType="float" scale="1"/>
<pdoEntry idx="7003" subIdx="03" bitLen="16" halPin="control_word" halType="bit"/>
<pdoEntry idx="7004" subIdx="01" bitLen="32" halPin="comparation_valuev" halType="float" scale="1"/>
<pdoEntry idx="7004" subIdx="02" bitLen="32" halPin="setvaluev" halType="float" scale="1"/>
<pdoEntry idx="7004" subIdx="03" bitLen="16" halPin="control_wordv" halType="bit"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6000" subIdx="01" bitLen="8" halPin="in_veloci" halType="bit"/>
<pdoEntry idx="6003" subIdx="01" bitLen="32" halPin="counter_value" halType="float" scale="1"/>
<pdoEntry idx="6003" subIdx="02" bitLen="16" halPin="counter_status" halType="bit"/>
<pdoEntry idx="6003" subIdx="03" bitLen="16" halPin="microsecond" halType="S32"/>
<pdoEntry idx="6004" subIdx="01" bitLen="32" halPin="counter_valuev" halType="float" scale="1"/>
<pdoEntry idx="6004" subIdx="02" bitLen="16" halPin="counter_statusv" halType="bit"/>
<pdoEntry idx="6004" subIdx="03" bitLen="16" halPin="microsecondv" halType="S32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE X -->
<slave idx="1" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000078125 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE Y -->
<slave idx="2" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE Z -->
<slave idx="3" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI SP -->
<slave idx="4" type="generic" vid="01dd" pid="10400140" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6042" subIdx="00" bitLen="16" halPin="cmdvel" halType="float"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE A -->
<slave idx="5" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE B -->
<slave idx="6" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE C -->
<slave idx="7" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
</master>
</masters>
Last edit: 12 Apr 2026 14:07 by Aciera. Reason: use a spoiler
Please Log in or Create an account to join the conversation.
- papagno-source
- Offline
- Elite Member
-
Less
More
- Posts: 170
- Thank you received: 13
12 Apr 2026 12:44 - 12 Apr 2026 14:06 #345446
by papagno-source
Replied by papagno-source on topic Ethercat random jitter fix
xml on debian trixie
i have test refClockSyncCycles = -1 , but problem is the same
<masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="1" syncToRefClock="true">
<slave idx="0" type="generic" vid="0000022b" pid="0531ec01" configPdos="true">
<sdoConfig idx="3103" subIdx="08">
<sdoDataRaw data="16"/>
</sdoConfig>
<sdoConfig idx="3104" subIdx="08">
<sdoDataRaw data="16"/>
</sdoConfig>
<sdoConfig idx="3103" subIdx="09">
<sdoDataRaw data="03"/>
</sdoConfig>
<sdoConfig idx="3104" subIdx="09">
<sdoDataRaw data="01"/>
</sdoConfig>
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="7001" subIdx="01" bitLen="8" halPin="out_veloci" halType="bit"/>
<pdoEntry idx="7002" subIdx="01" bitLen="16" halPin="ao0" halType="float" scale="2765"/>
<pdoEntry idx="7002" subIdx="02" bitLen="16" halPin="ao1" halType="float" scale="2765"/>
<pdoEntry idx="7003" subIdx="01" bitLen="32" halPin="comparation_value" halType="float" scale="1"/>
<pdoEntry idx="7003" subIdx="02" bitLen="32" halPin="setvalue" halType="float" scale="1"/>
<pdoEntry idx="7003" subIdx="03" bitLen="16" halPin="control_word" halType="bit"/>
<pdoEntry idx="7004" subIdx="01" bitLen="32" halPin="comparation_valuev" halType="float" scale="1"/>
<pdoEntry idx="7004" subIdx="02" bitLen="32" halPin="setvaluev" halType="float" scale="1"/>
<pdoEntry idx="7004" subIdx="03" bitLen="16" halPin="control_wordv" halType="bit"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6000" subIdx="01" bitLen="8" halPin="in_veloci" halType="bit"/>
<pdoEntry idx="6003" subIdx="01" bitLen="32" halPin="counter_value" halType="float" scale="1"/>
<pdoEntry idx="6003" subIdx="02" bitLen="16" halPin="counter_status" halType="bit"/>
<pdoEntry idx="6003" subIdx="03" bitLen="16" halPin="microsecond" halType="S32"/>
<pdoEntry idx="6004" subIdx="01" bitLen="32" halPin="counter_valuev" halType="float" scale="1"/>
<pdoEntry idx="6004" subIdx="02" bitLen="16" halPin="counter_statusv" halType="bit"/>
<pdoEntry idx="6004" subIdx="03" bitLen="16" halPin="microsecondv" halType="S32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE X -->
<slave idx="1" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000078125 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE Y -->
<slave idx="2" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE Z -->
<slave idx="3" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI SP -->
<slave idx="4" type="generic" vid="01dd" pid="10400140" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6042" subIdx="00" bitLen="16" halPin="cmdvel" halType="float"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE A -->
<slave idx="5" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE B -->
<slave idx="6" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE C -->
<slave idx="7" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
</master>
</masters>
i have test refClockSyncCycles = -1 , but problem is the same
Warning: Spoiler!
<masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="1" syncToRefClock="true">
<slave idx="0" type="generic" vid="0000022b" pid="0531ec01" configPdos="true">
<sdoConfig idx="3103" subIdx="08">
<sdoDataRaw data="16"/>
</sdoConfig>
<sdoConfig idx="3104" subIdx="08">
<sdoDataRaw data="16"/>
</sdoConfig>
<sdoConfig idx="3103" subIdx="09">
<sdoDataRaw data="03"/>
</sdoConfig>
<sdoConfig idx="3104" subIdx="09">
<sdoDataRaw data="01"/>
</sdoConfig>
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="7001" subIdx="01" bitLen="8" halPin="out_veloci" halType="bit"/>
<pdoEntry idx="7002" subIdx="01" bitLen="16" halPin="ao0" halType="float" scale="2765"/>
<pdoEntry idx="7002" subIdx="02" bitLen="16" halPin="ao1" halType="float" scale="2765"/>
<pdoEntry idx="7003" subIdx="01" bitLen="32" halPin="comparation_value" halType="float" scale="1"/>
<pdoEntry idx="7003" subIdx="02" bitLen="32" halPin="setvalue" halType="float" scale="1"/>
<pdoEntry idx="7003" subIdx="03" bitLen="16" halPin="control_word" halType="bit"/>
<pdoEntry idx="7004" subIdx="01" bitLen="32" halPin="comparation_valuev" halType="float" scale="1"/>
<pdoEntry idx="7004" subIdx="02" bitLen="32" halPin="setvaluev" halType="float" scale="1"/>
<pdoEntry idx="7004" subIdx="03" bitLen="16" halPin="control_wordv" halType="bit"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6000" subIdx="01" bitLen="8" halPin="in_veloci" halType="bit"/>
<pdoEntry idx="6003" subIdx="01" bitLen="32" halPin="counter_value" halType="float" scale="1"/>
<pdoEntry idx="6003" subIdx="02" bitLen="16" halPin="counter_status" halType="bit"/>
<pdoEntry idx="6003" subIdx="03" bitLen="16" halPin="microsecond" halType="S32"/>
<pdoEntry idx="6004" subIdx="01" bitLen="32" halPin="counter_valuev" halType="float" scale="1"/>
<pdoEntry idx="6004" subIdx="02" bitLen="16" halPin="counter_statusv" halType="bit"/>
<pdoEntry idx="6004" subIdx="03" bitLen="16" halPin="microsecondv" halType="S32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE X -->
<slave idx="1" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000078125 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE Y -->
<slave idx="2" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE Z -->
<slave idx="3" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI SP -->
<slave idx="4" type="generic" vid="01dd" pid="10400140" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6042" subIdx="00" bitLen="16" halPin="cmdvel" halType="float"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE A -->
<slave idx="5" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE B -->
<slave idx="6" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE C -->
<slave idx="7" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
</master>
</masters>
Last edit: 12 Apr 2026 14:06 by Aciera. Reason: use a spoiler
Please Log in or Create an account to join the conversation.
Time to create page: 0.239 seconds