Search Results (Searched for: raspberry)
- tommylight

01 Dec 2025 18:03
Replied by tommylight on topic User name rpi-first-boot-wizard
User name rpi-first-boot-wizard
Category: Installing LinuxCNC
- unknown
- unknown
01 Dec 2025 03:55
Replied by unknown on topic The Current Bread & Butter Setup?
The Current Bread & Butter Setup?
Category: General LinuxCNC Questions
- Ul
- Ul
30 Nov 2025 21:32 - 30 Nov 2025 21:34
Replied by Ul on topic Wie stabil läuft eigentlich die Linux CNC Sache?
Wie stabil läuft eigentlich die Linux CNC Sache?
Category: Deutsch
- Billy Boy
- Billy Boy
30 Nov 2025 17:13
The Current Bread & Butter Setup? was created by Billy Boy
The Current Bread & Butter Setup?
Category: General LinuxCNC Questions
- pgenns24
- pgenns24
29 Nov 2025 23:21
- Will_cnc
- Will_cnc
29 Nov 2025 22:10
- Chad
- Chad
29 Nov 2025 10:49
- Ul
- Ul
27 Nov 2025 20:05 - 27 Nov 2025 20:08
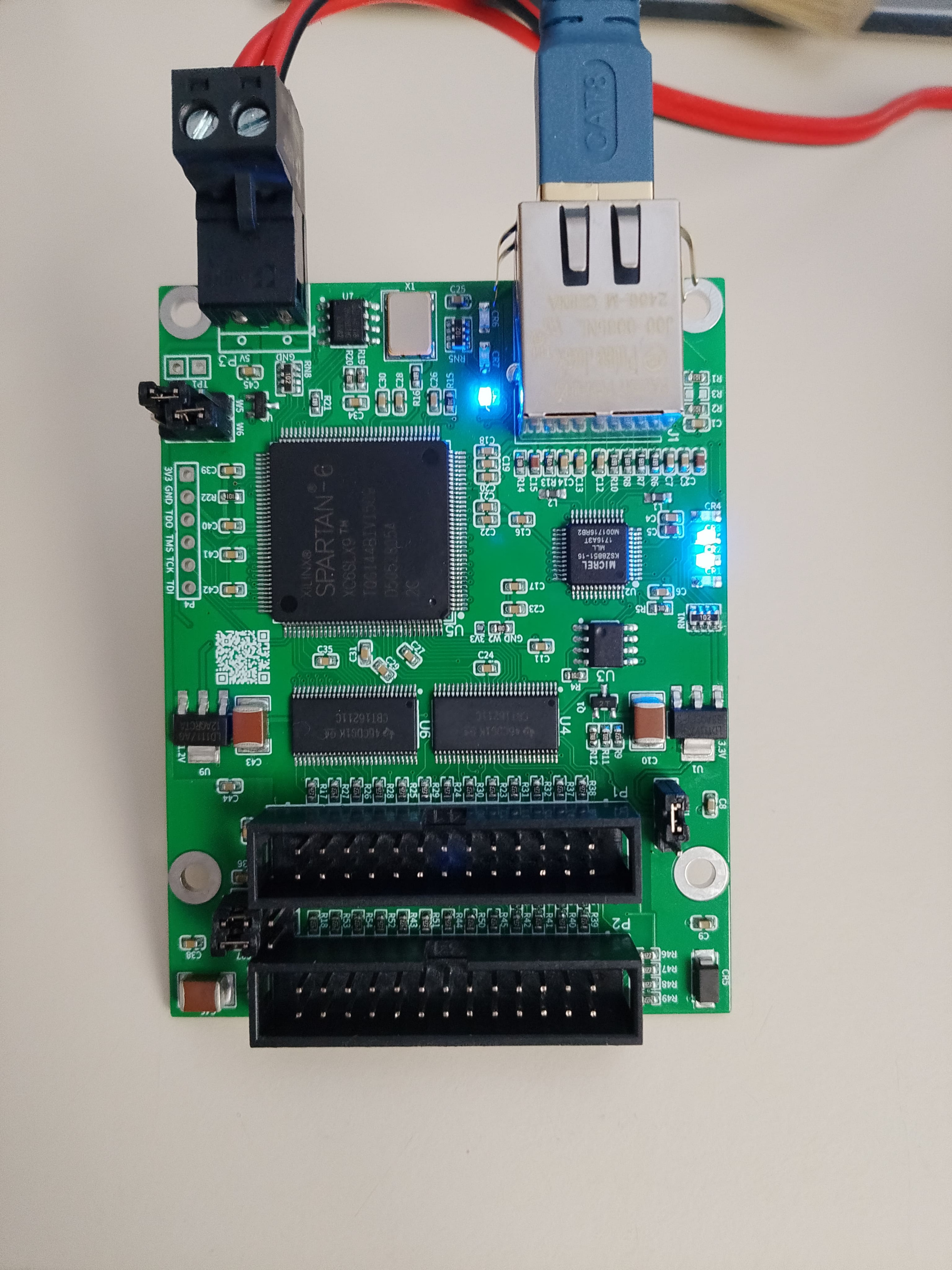
Replied by Ul on topic Chinese Mesa 7I92 from aliexpress NEW
Chinese Mesa 7I92 from aliexpress NEW
Category: Driver Boards

- meister
- meister
25 Nov 2025 05:47 - 25 Nov 2025 05:57
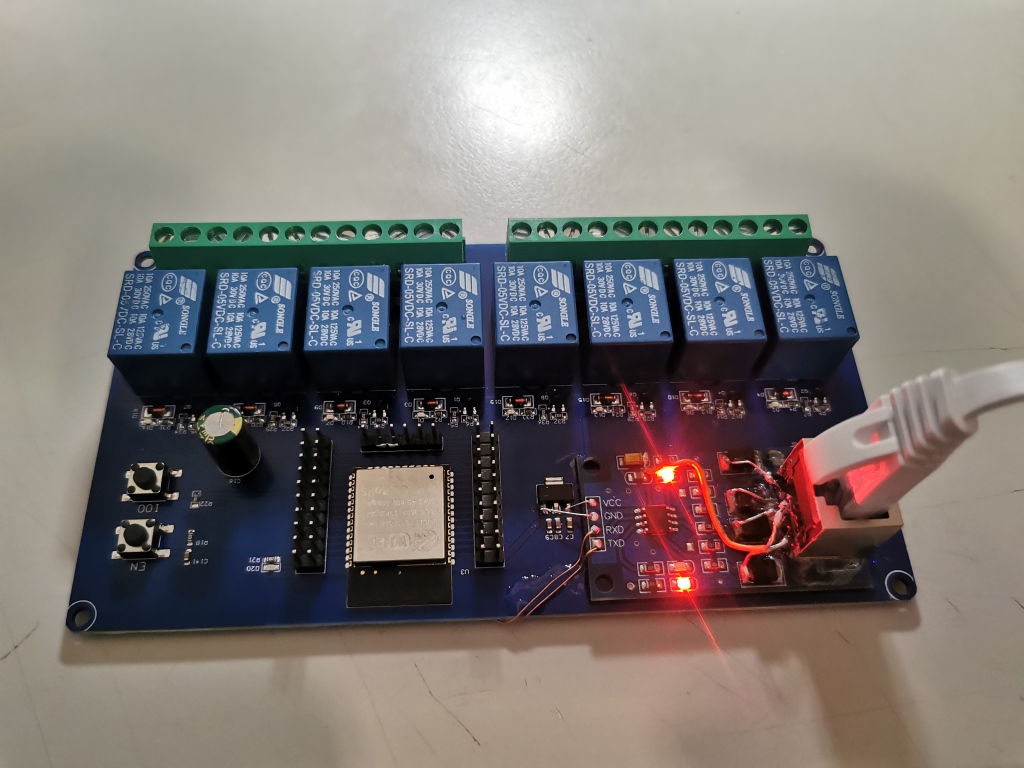
SmartSerial on cheap ESP32-8ch-Relais Card was created by meister
SmartSerial on cheap ESP32-8ch-Relais Card
Category: Driver Boards
- meister
- meister
24 Nov 2025 07:57
Replied by meister on topic Tipps für aktuelle LinuxCNC Hardware gesucht
Tipps für aktuelle LinuxCNC Hardware gesucht
Category: Deutsch
- unknown
- unknown
24 Nov 2025 01:59
Replied by unknown on topic Gmoccapy Raspberry Pi 4/5 OS based on Debian Trixie Tool Table Error?
Gmoccapy Raspberry Pi 4/5 OS based on Debian Trixie Tool Table Error?
Category: Gmoccapy
- garulus
- garulus
23 Nov 2025 20:06 - 23 Nov 2025 21:36
Replied by garulus on topic Gmoccapy Raspberry Pi 4/5 OS based on Debian Trixie Tool Table Error?
Gmoccapy Raspberry Pi 4/5 OS based on Debian Trixie Tool Table Error?
Category: Gmoccapy
- zz912

23 Nov 2025 18:59
Replied by zz912 on topic Gmoccapy Raspberry Pi 4/5 OS based on Debian Trixie Tool Table Error?
Gmoccapy Raspberry Pi 4/5 OS based on Debian Trixie Tool Table Error?
Category: Gmoccapy
- garulus
- garulus
23 Nov 2025 18:45
- Ul
- Ul
21 Nov 2025 12:52 - 21 Nov 2025 13:26
Replied by Ul on topic Tipps für aktuelle LinuxCNC Hardware gesucht
Tipps für aktuelle LinuxCNC Hardware gesucht
Category: Deutsch
Time to create page: 1.443 seconds