Search Results (Searched for: )
- TheTinkeringMechanic1
- TheTinkeringMechanic1
01 Aug 2025 18:24
Replied by TheTinkeringMechanic1 on topic Spindle speed?
Spindle speed?
Category: Basic Configuration
- PCW

01 Aug 2025 17:36
Replied by PCW on topic Mesa 7i96S MPG encoder on P1
Mesa 7i96S MPG encoder on P1
Category: Driver Boards
- roland100
- roland100
01 Aug 2025 16:45
Replied by roland100 on topic Mesa 7i96S MPG encoder on P1
Mesa 7i96S MPG encoder on P1
Category: Driver Boards
- --Matt--
- --Matt--
01 Aug 2025 16:32 - 01 Aug 2025 21:18
Surfacemap Z compensation with Probe Basic was created by --Matt--
Surfacemap Z compensation with Probe Basic
Category: QtPyVCP
- my1987toyota

01 Aug 2025 16:18 - 01 Aug 2025 16:19
Replied by my1987toyota on topic Voron Life , for anyone going into 3D printing !
Voron Life , for anyone going into 3D printing !
Category: Additive Manufacturing
- Jonathan_H
- Jonathan_H
01 Aug 2025 15:39
Replied by Jonathan_H on topic System hangs repeatedly with certain combinations of operations
System hangs repeatedly with certain combinations of operations
Category: General LinuxCNC Questions
- Mars
- Mars
01 Aug 2025 15:33
Replied by Mars on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- Mars
- Mars
01 Aug 2025 14:55
Replied by Mars on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- Aciera

01 Aug 2025 14:47
Replied by Aciera on topic Advice sought...getting started with Remora/Linuxcnc
Advice sought...getting started with Remora/Linuxcnc
Category: Computers and Hardware
- Jonathan_H
- Jonathan_H
01 Aug 2025 12:06
Replied by Jonathan_H on topic System hangs repeatedly with certain combinations of operations
System hangs repeatedly with certain combinations of operations
Category: General LinuxCNC Questions
- Jonathan_H
- Jonathan_H
01 Aug 2025 12:02
Replied by Jonathan_H on topic System hangs repeatedly with certain combinations of operations
System hangs repeatedly with certain combinations of operations
Category: General LinuxCNC Questions
- atrex77

01 Aug 2025 11:34
Replied by atrex77 on topic W5100S-EVB-PICO stepgenerator and encoder driver
W5100S-EVB-PICO stepgenerator and encoder driver
Category: Driver Boards
- dredivan
- dredivan
01 Aug 2025 11:25 - 01 Aug 2025 11:39
Replied by dredivan on topic Touch off don`t work "file not open"
Touch off don`t work "file not open"
Category: AXIS
- Cysign
- Cysign
01 Aug 2025 11:19
Interfaces & linear scale for LinuxCNC was created by Cysign
Interfaces & linear scale for LinuxCNC
Category: General LinuxCNC Questions
")
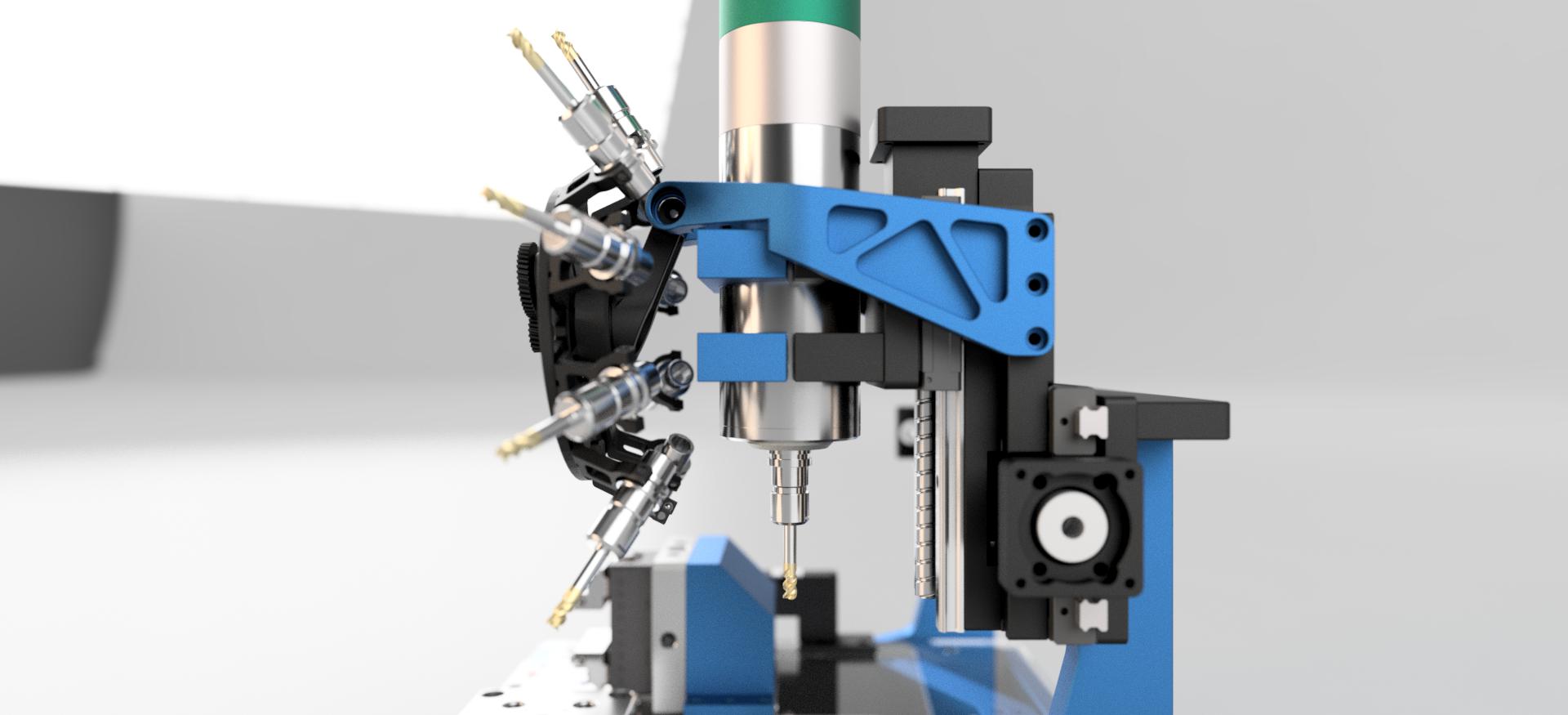
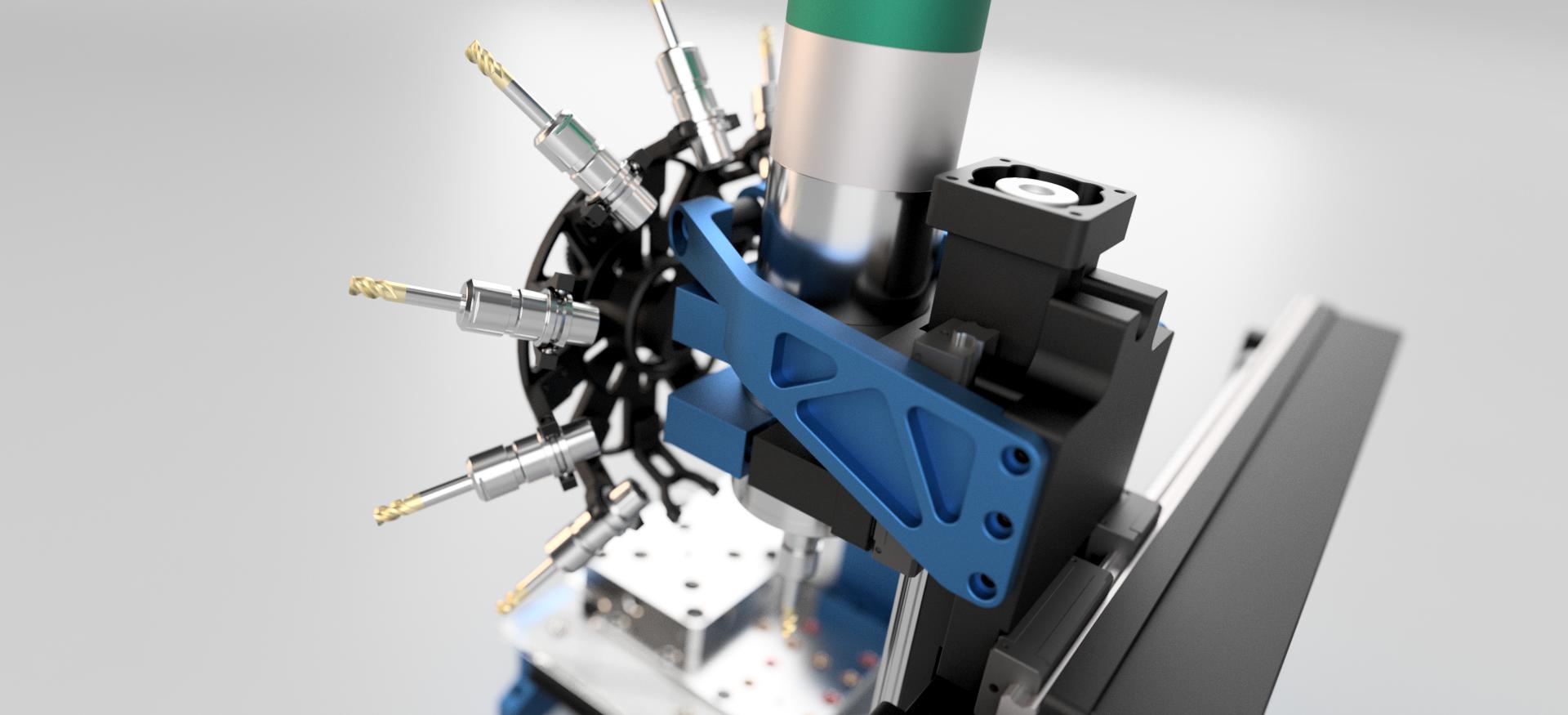
- ihavenofish
- ihavenofish
01 Aug 2025 05:27
Replied by ihavenofish on topic Mini wannabe datron build
Mini wannabe datron build
Category: CNC Machines
Time to create page: 0.642 seconds