Search Results (Searched for: )
- tommylight

29 Apr 2025 02:36 - 29 Apr 2025 02:39
Replied by tommylight on topic Tandem Y Axis in stepconf assistance.
Tandem Y Axis in stepconf assistance.
Category: StepConf Wizard
- Mother Canucker
- Mother Canucker
29 Apr 2025 02:36
Replied by Mother Canucker on topic Tandem Y Axis in stepconf assistance.
Tandem Y Axis in stepconf assistance.
Category: StepConf Wizard
- Mother Canucker
- Mother Canucker
29 Apr 2025 02:23
Replied by Mother Canucker on topic Tandem Y Axis in stepconf assistance.
Tandem Y Axis in stepconf assistance.
Category: StepConf Wizard
- tommylight
29 Apr 2025 01:39
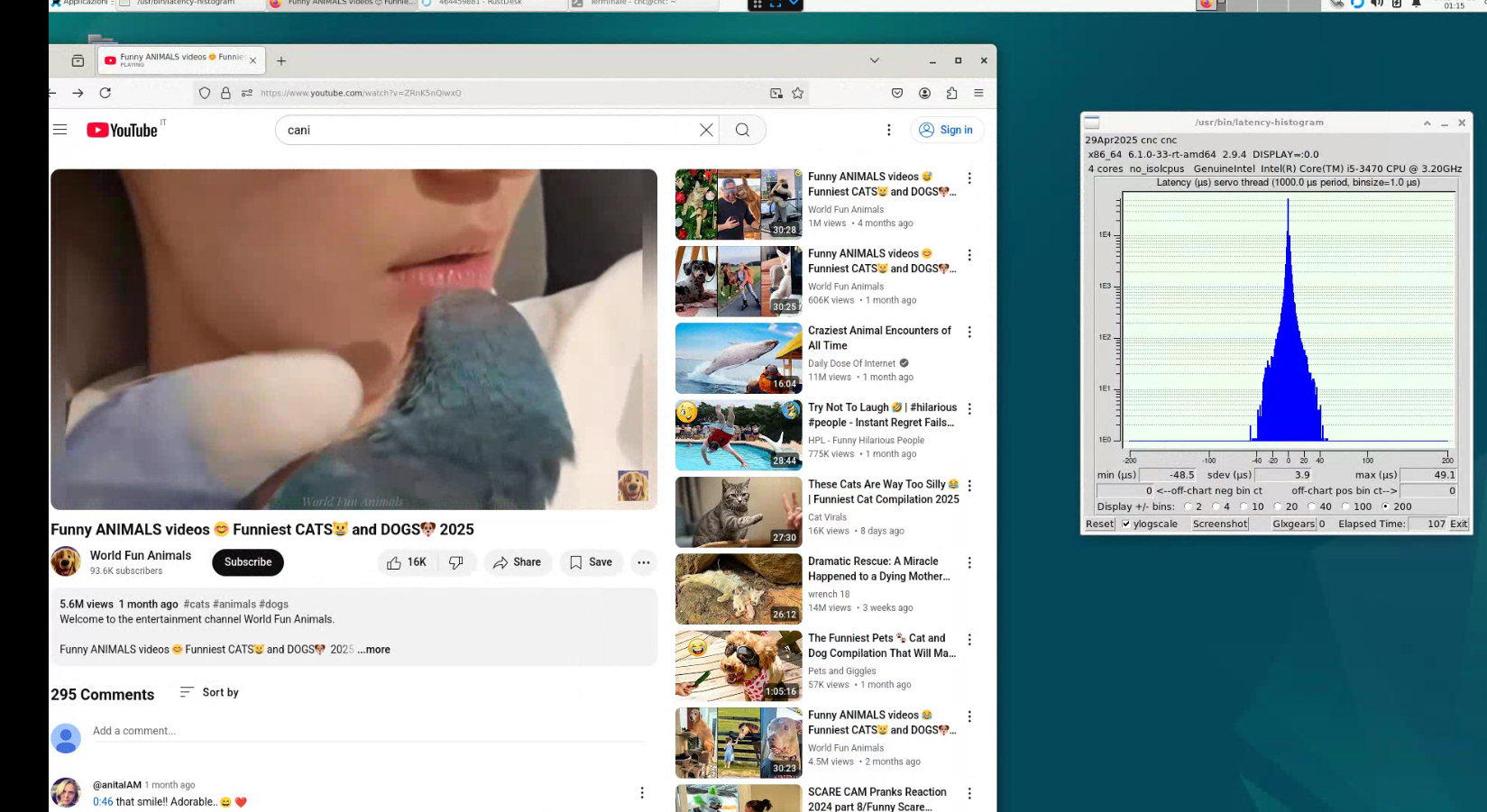
Replied by tommylight on topic [SOLVED]linuxcnc Latency test ambiguous results
[SOLVED]linuxcnc Latency test ambiguous results
Category: General LinuxCNC Questions
- Soccer Kid

29 Apr 2025 00:42
Replied by Soccer Kid on topic General Questions about using ethercat
General Questions about using ethercat
Category: EtherCAT
- DarkPhoinix
- DarkPhoinix
29 Apr 2025 00:13 - 29 Apr 2025 01:03
Replied by DarkPhoinix on topic [SOLVED]linuxcnc Latency test ambiguous results
[SOLVED]linuxcnc Latency test ambiguous results
Category: General LinuxCNC Questions
- tommylight
28 Apr 2025 23:39
- tommylight
28 Apr 2025 23:36
Replied by tommylight on topic [SOLVED]linuxcnc Latency test ambiguous results
[SOLVED]linuxcnc Latency test ambiguous results
Category: General LinuxCNC Questions
")
- electrosteam
- electrosteam
28 Apr 2025 23:30
- DarkPhoinix
- DarkPhoinix
28 Apr 2025 23:16 - 28 Apr 2025 23:17
Replied by DarkPhoinix on topic [SOLVED]linuxcnc Latency test ambiguous results
[SOLVED]linuxcnc Latency test ambiguous results
Category: General LinuxCNC Questions
- tommylight
28 Apr 2025 23:12
- tommylight
28 Apr 2025 23:10
Replied by tommylight on topic [SOLVED]linuxcnc Latency test ambiguous results
[SOLVED]linuxcnc Latency test ambiguous results
Category: General LinuxCNC Questions
- DarkPhoinix
- DarkPhoinix
28 Apr 2025 23:02 - 28 Apr 2025 23:03
Replied by DarkPhoinix on topic [SOLVED]linuxcnc Latency test ambiguous results
[SOLVED]linuxcnc Latency test ambiguous results
Category: General LinuxCNC Questions
- electrosteam
- electrosteam
28 Apr 2025 22:57
- tommylight
28 Apr 2025 22:27
Replied by tommylight on topic [SOLVED]linuxcnc Latency test ambiguous results
[SOLVED]linuxcnc Latency test ambiguous results
Category: General LinuxCNC Questions
Time to create page: 0.508 seconds