Search Results (Searched for: )
- tommy
- tommy
10 Feb 2025 09:05
Replied by tommy on topic 7i95T + 7i78 spindle configuration
7i95T + 7i78 spindle configuration
Category: Basic Configuration
- meister
- meister
10 Feb 2025 08:53
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
")
- partec
- partec
10 Feb 2025 08:41 - 10 Feb 2025 08:54
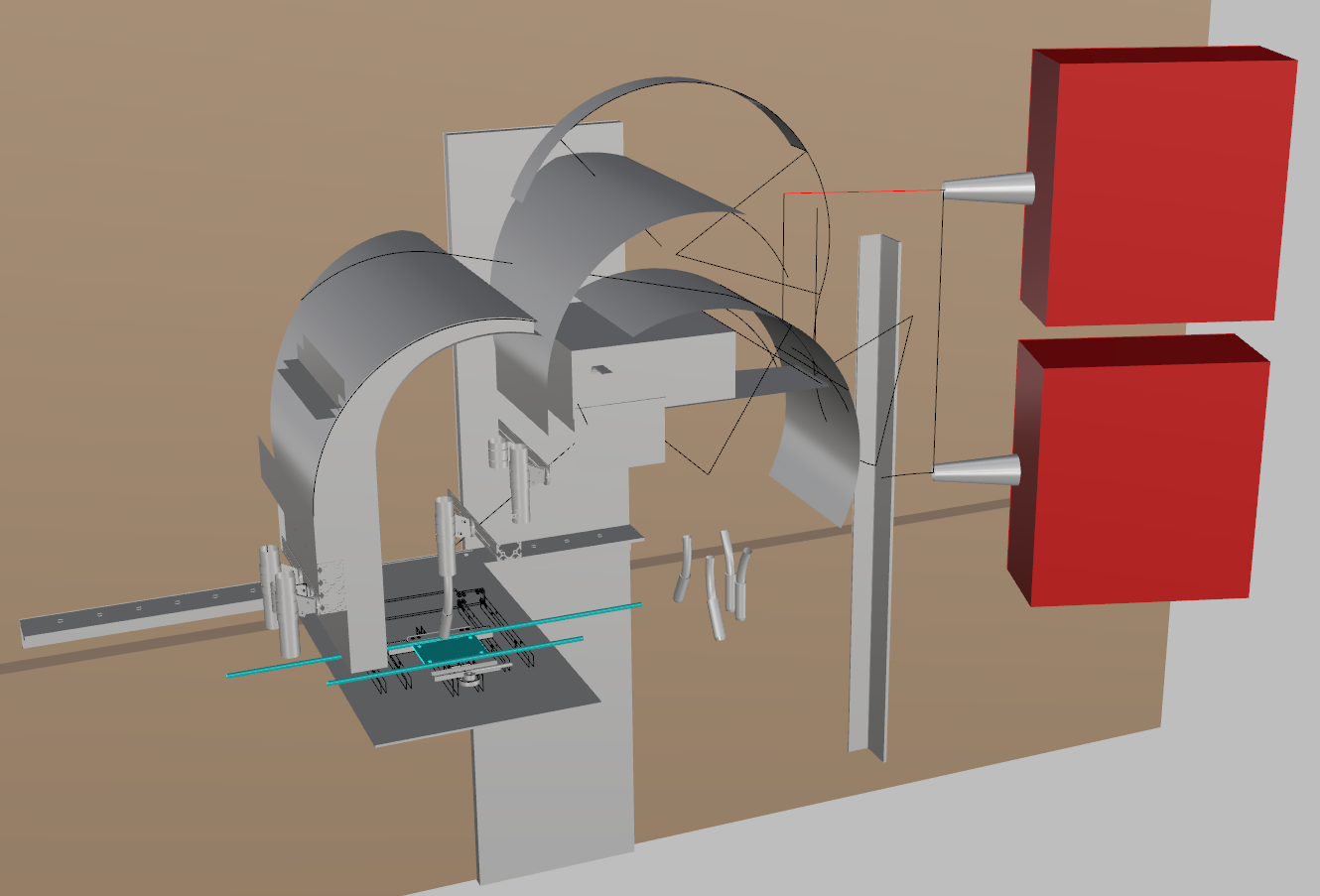
Replied by partec on topic Welding CNC-Touch sensing
Welding CNC-Touch sensing
Category: General LinuxCNC Questions
- automata
- automata
10 Feb 2025 08:35
Replied by automata on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- Martin.L
- Martin.L
10 Feb 2025 06:50
Replied by Martin.L on topic EtherCAT + lcec + cia402 + PID on A6-1000EC in velocity control mode
EtherCAT + lcec + cia402 + PID on A6-1000EC in velocity control mode
Category: EtherCAT
- beauxnez
- beauxnez
10 Feb 2025 05:18 - 10 Feb 2025 05:19
Replied by beauxnez on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- cakeslob
- cakeslob
10 Feb 2025 05:06
Replied by cakeslob on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- akg1904
- akg1904
10 Feb 2025 04:34
Replied by akg1904 on topic Pitch Error Compensation explanation
Pitch Error Compensation explanation
Category: General LinuxCNC Questions
- beauxnez
- beauxnez
10 Feb 2025 04:13
Replied by beauxnez on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- Lcvette

10 Feb 2025 02:18
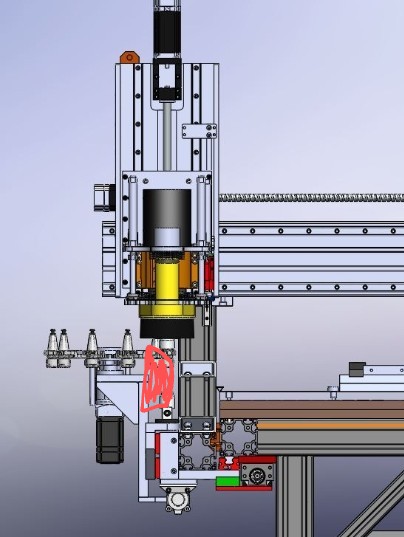
Replied by Lcvette on topic ProbeBasic and sidemount, retractable 3D Probe
ProbeBasic and sidemount, retractable 3D Probe
Category: QtPyVCP
- grandixximo

10 Feb 2025 02:16 - 10 Feb 2025 07:46
Vscode gcode highlight and formatter, with subroutine support was created by grandixximo
Vscode gcode highlight and formatter, with subroutine support
Category: O Codes (subroutines) and NGCGUI
- Grotius

10 Feb 2025 01:43
Replied by Grotius on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions

- PCW

09 Feb 2025 23:37
- unknown
- unknown
09 Feb 2025 23:30
Replied by unknown on topic From Grbl to linuxcnc
From Grbl to linuxcnc
Category: General LinuxCNC Questions
- unknown
- unknown
09 Feb 2025 23:24
Replied by unknown on topic LinuxCNC on Raspberry Pi 5
LinuxCNC on Raspberry Pi 5
Category: Installing LinuxCNC
Time to create page: 1.163 seconds