Search Results (Searched for: )
- Lcvette

18 Oct 2024 13:35
Replied by Lcvette on topic Tool length sensor direction change
Tool length sensor direction change
Category: QtPyVCP
- tsaG
- tsaG
18 Oct 2024 13:23 - 18 Oct 2024 13:29
Replied by tsaG on topic Tool length sensor direction change
Tool length sensor direction change
Category: QtPyVCP
- flexbex
- flexbex
18 Oct 2024 13:15
- Grotius

18 Oct 2024 13:13
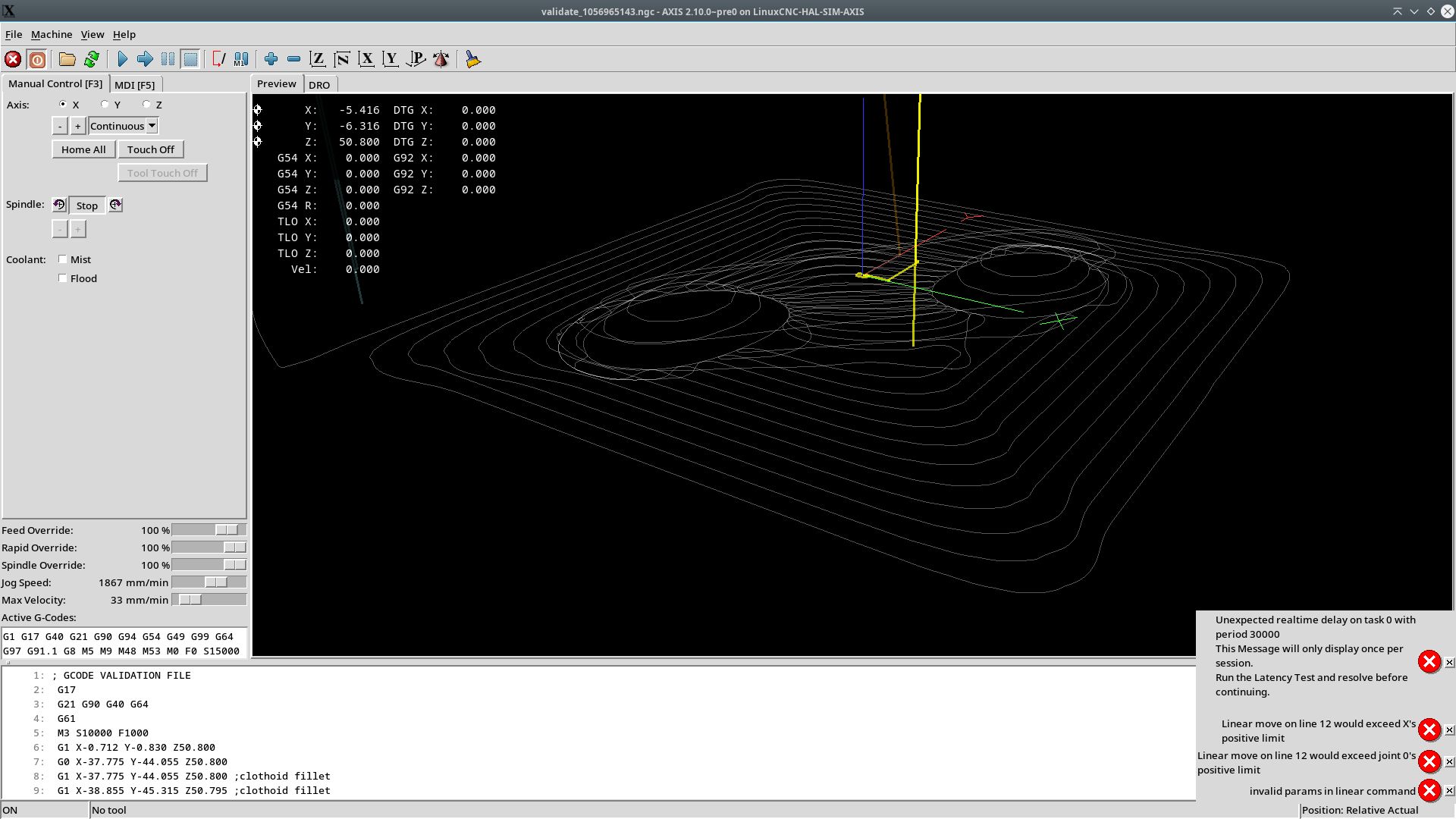
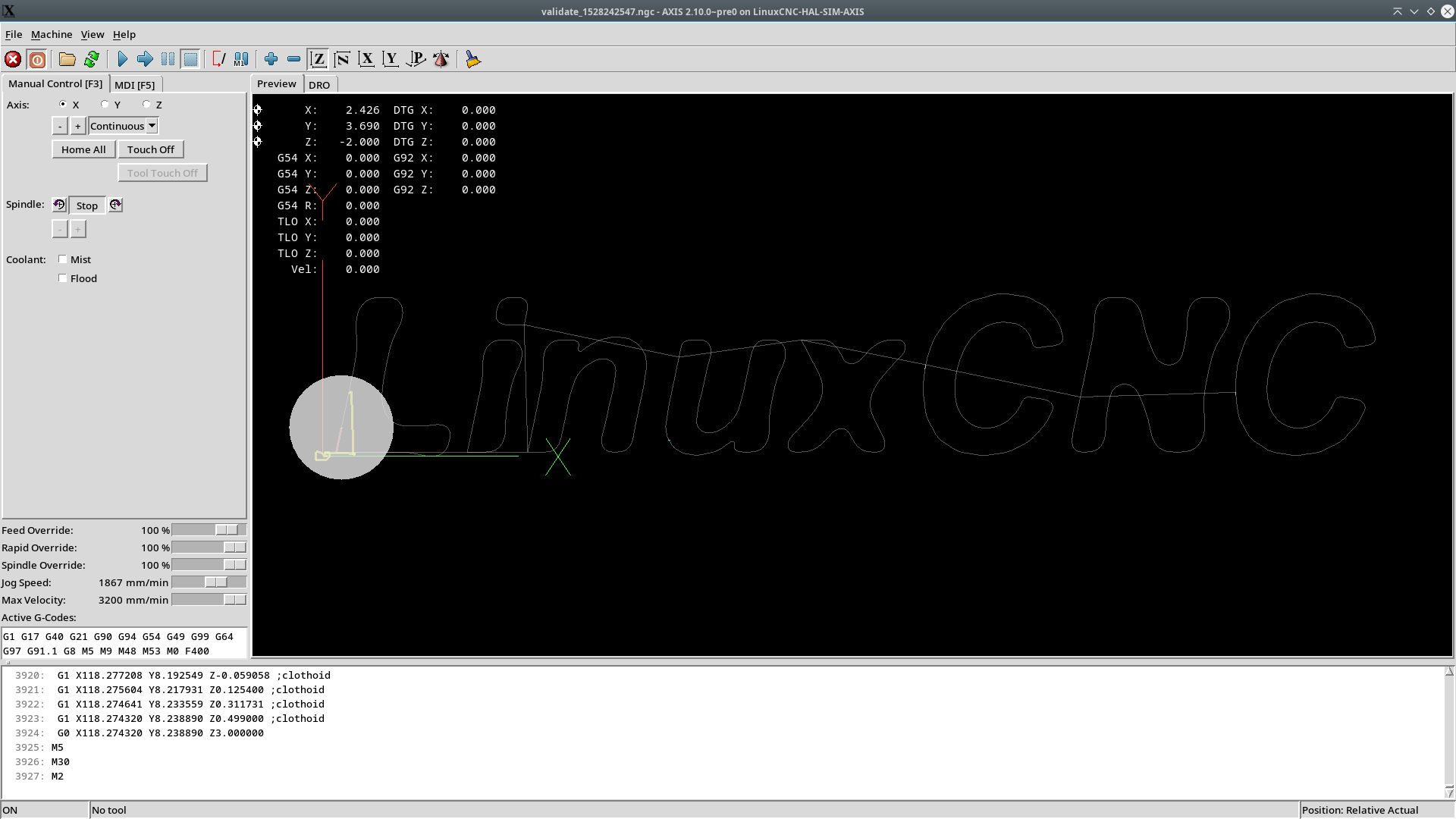
Replied by Grotius on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions



- rajsekhar
- rajsekhar
18 Oct 2024 13:07
- royka
- royka
18 Oct 2024 13:04
Replied by royka on topic Can the OPI5 be Configured to Run LCNC?
Can the OPI5 be Configured to Run LCNC?
Category: Computers and Hardware
- Aciera

18 Oct 2024 12:15
Replied by Aciera on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions
- JT

18 Oct 2024 12:00
- Grotius
18 Oct 2024 11:56
Replied by Grotius on topic c++ compiling error
c++ compiling error
Category: Advanced Configuration
- Grotius
18 Oct 2024 11:39
Replied by Grotius on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions

- Lcvette
18 Oct 2024 11:37
Replied by Lcvette on topic Another Idiot attempts to use Probe Basic and begs for help
Another Idiot attempts to use Probe Basic and begs for help
Category: QtPyVCP
- rajsekhar
- rajsekhar
18 Oct 2024 11:34
Replied by rajsekhar on topic Latency and Graphics Card
Latency and Graphics Card
Category: General LinuxCNC Questions
- tsaG
- tsaG
18 Oct 2024 11:33
Replied by tsaG on topic [ Vfdmod ] An easy VFD control over MODBUS RTU
[ Vfdmod ] An easy VFD control over MODBUS RTU
Category: HAL
- FedX
- FedX
18 Oct 2024 11:30 - 18 Oct 2024 13:23
- Lcvette
18 Oct 2024 11:29
Replied by Lcvette on topic Another Idiot attempts to use Probe Basic and begs for help
Another Idiot attempts to use Probe Basic and begs for help
Category: QtPyVCP
Time to create page: 1.021 seconds