Search Results (Searched for: )
- rdtsc

15 Aug 2024 01:00 - 15 Aug 2024 01:04
Replied by rdtsc on topic Pi4b and Pi5 users - What should go in a 2.9.3 image
Pi4b and Pi5 users - What should go in a 2.9.3 image
Category: Installing LinuxCNC
")
- Benb

15 Aug 2024 00:58
- Mecanix
- Mecanix
15 Aug 2024 00:48
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Benb
15 Aug 2024 00:40
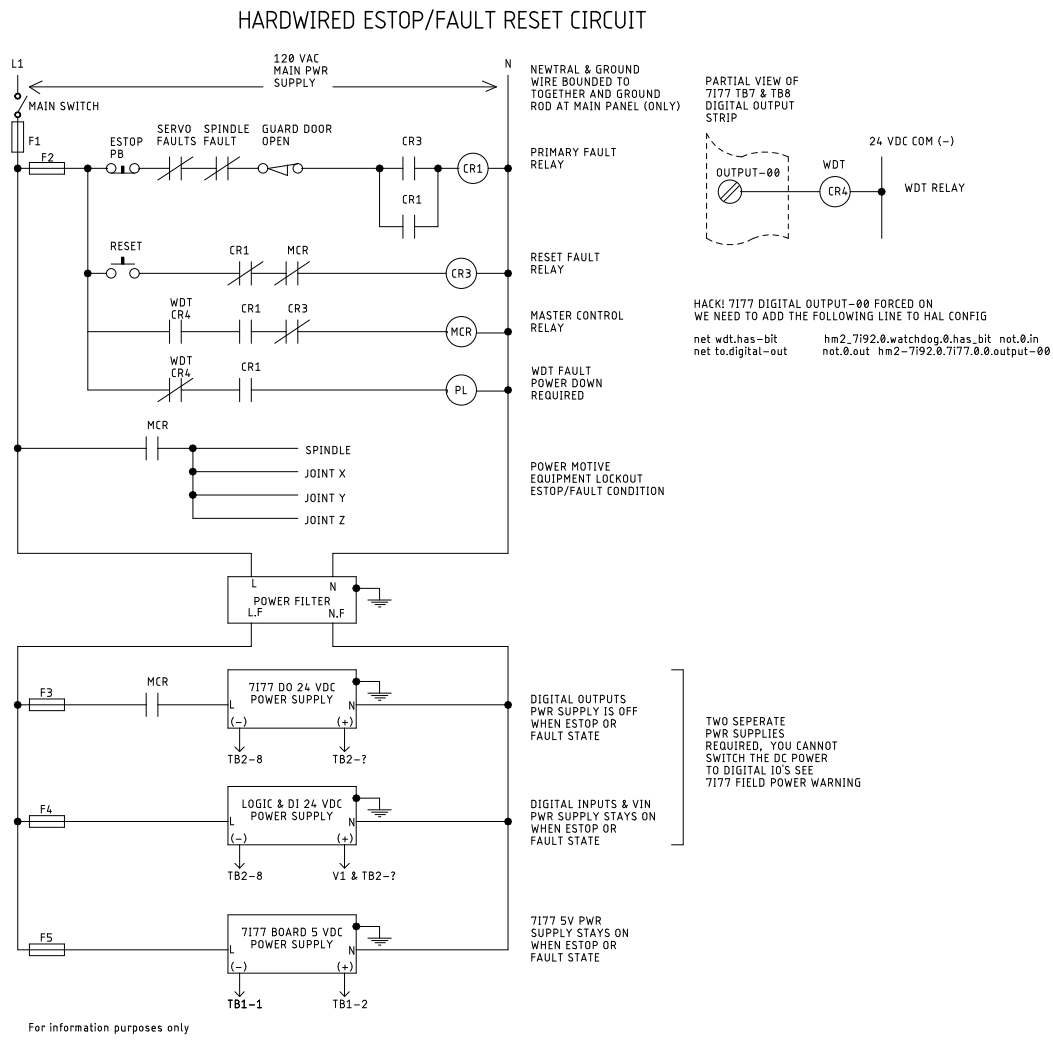
HARDWIRED ESTOP/RESET CIRCUIT was created by Benb
HARDWIRED ESTOP/RESET CIRCUIT
Category: HAL Examples
- PCW

14 Aug 2024 23:54
Replied by PCW on topic 7i97t with 7i84d connection problem
7i97t with 7i84d connection problem
Category: Driver Boards
- rthorntn
- rthorntn
14 Aug 2024 23:18
Replied by rthorntn on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Hauligali22
- Hauligali22
14 Aug 2024 23:04
Replied by Hauligali22 on topic ROS LinuxCNC Link
ROS LinuxCNC Link
Category: General LinuxCNC Questions
- amitsa

14 Aug 2024 22:15
Replied by amitsa on topic Jogging not working on basic setup
Jogging not working on basic setup
Category: Basic Configuration
- Limo
- Limo
14 Aug 2024 22:14
- amitsa
14 Aug 2024 22:09
Replied by amitsa on topic Jogging not working on basic setup
Jogging not working on basic setup
Category: Basic Configuration
- garthnoakes
- garthnoakes
14 Aug 2024 22:02
Replied by garthnoakes on topic Hot wire foam cutter - mapping Z and A axes to U and V
Hot wire foam cutter - mapping Z and A axes to U and V
Category: Basic Configuration
- AlessandroEmm
- AlessandroEmm
14 Aug 2024 21:45
Beginners homing woes was created by AlessandroEmm
Beginners homing woes
Category: Basic Configuration
- PCW
14 Aug 2024 21:31 - 14 Aug 2024 21:35
Replied by PCW on topic qtplasmac (Operation Error: hm2/hm2_7i76e.0:) in middle of cut
qtplasmac (Operation Error: hm2/hm2_7i76e.0:) in middle of cut
Category: Plasmac
- fons

14 Aug 2024 21:12
Replied by fons on topic 7i97t with 7i84d connection problem
7i97t with 7i84d connection problem
Category: Driver Boards
- rodw

14 Aug 2024 20:51
Replied by rodw on topic Jogging not working on basic setup
Jogging not working on basic setup
Category: Basic Configuration
Time to create page: 0.753 seconds