Search Results (Searched for: )
- snowgoer540

11 Jul 2024 23:31
Replied by snowgoer540 on topic qtplasmac "torch not showing"
qtplasmac "torch not showing"
Category: Plasmac
")
- snowgoer540
11 Jul 2024 23:25
Replied by snowgoer540 on topic qtplasmac "torch not showing"
qtplasmac "torch not showing"
Category: Plasmac
- Cant do this anymore bye all

11 Jul 2024 22:02
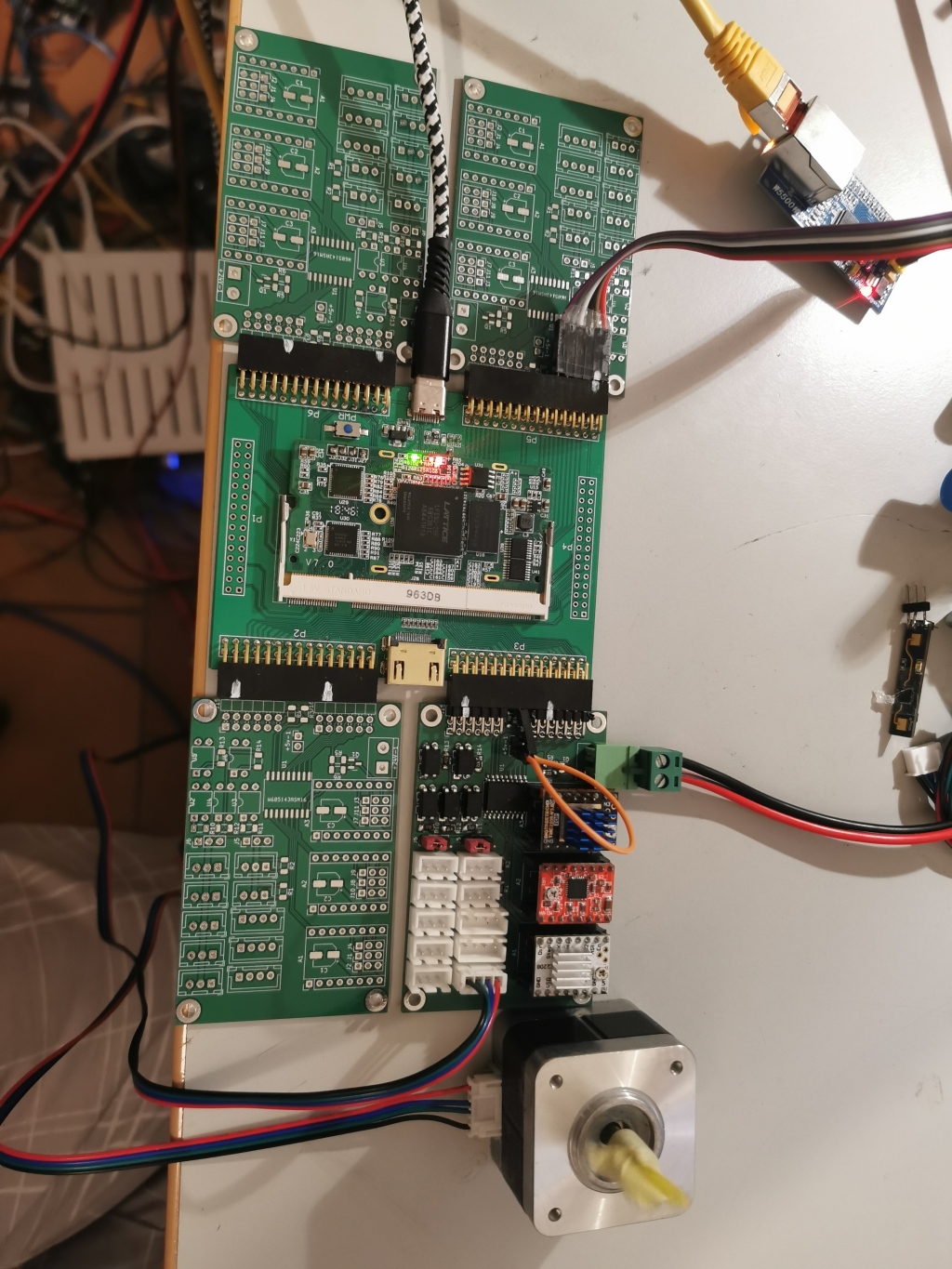
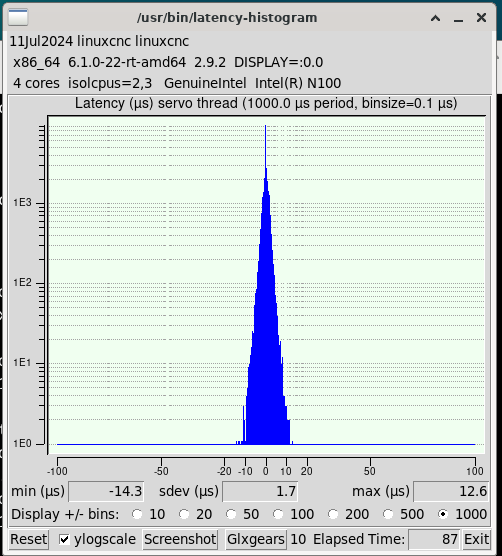
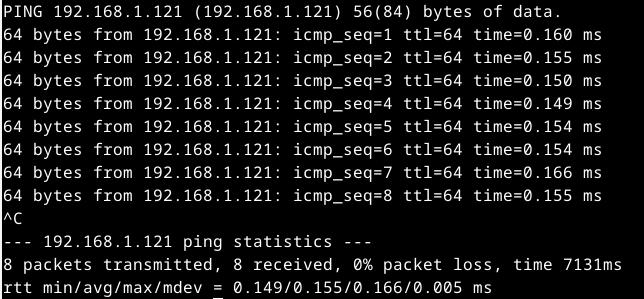
Replied by Cant do this anymore bye all on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- meister
- meister
11 Jul 2024 21:28
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- tommylight

11 Jul 2024 20:57 - 12 Jul 2024 15:33
Replied by tommylight on topic How to monitor OP mode in Panasonic A6B Ethercat
How to monitor OP mode in Panasonic A6B Ethercat
Category: EtherCAT
- meme
- meme
11 Jul 2024 19:41
Replied by meme on topic [solved] Auto Tool Measurement
[solved] Auto Tool Measurement
Category: Qtvcp
- besriworld
- besriworld
11 Jul 2024 19:33
Replied by besriworld on topic OLD Lathe conversion to a CNC
OLD Lathe conversion to a CNC
Category: Turning
- endian

11 Jul 2024 19:27
Replied by endian on topic How to monitor OP mode in Panasonic A6B Ethercat
How to monitor OP mode in Panasonic A6B Ethercat
Category: EtherCAT
- VonSzarvas
- VonSzarvas
11 Jul 2024 19:03 - 11 Jul 2024 19:05
Replied by VonSzarvas on topic n100 mesact get cpu speed
n100 mesact get cpu speed
Category: Computers and Hardware

- Grotius

11 Jul 2024 18:59
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- Aciera

11 Jul 2024 18:18
Replied by Aciera on topic How to monitor OP mode in Panasonic A6B Ethercat
How to monitor OP mode in Panasonic A6B Ethercat
Category: EtherCAT
- Altenthaler1988
- Altenthaler1988
11 Jul 2024 18:17
Replied by Altenthaler1988 on topic qtplasmac "torch not showing"
qtplasmac "torch not showing"
Category: Plasmac
- tommylight
11 Jul 2024 17:57
Replied by tommylight on topic Appreciation to the Mesa board
Appreciation to the Mesa board
Category: Driver Boards
- marq_torque

11 Jul 2024 17:32
Replied by marq_torque on topic How to monitor OP mode in Panasonic A6B Ethercat
How to monitor OP mode in Panasonic A6B Ethercat
Category: EtherCAT
- marq_torque
11 Jul 2024 17:30
Replied by marq_torque on topic How to monitor OP mode in Panasonic A6B Ethercat
How to monitor OP mode in Panasonic A6B Ethercat
Category: EtherCAT
Time to create page: 0.860 seconds