Search Results (Searched for: )
- joshualee777
- joshualee777
09 Aug 2025 17:45
Replied by joshualee777 on topic Amplifier Fault ECT60 Closed Loop
Amplifier Fault ECT60 Closed Loop
Category: EtherCAT
- Cncninja
- Cncninja
09 Aug 2025 17:38
Replied by Cncninja on topic Linux based all in one anyone see whats under the hood yet?
Linux based all in one anyone see whats under the hood yet?
Category: Computers and Hardware
- PCW

09 Aug 2025 17:38
Replied by PCW on topic Bitfile for 6i25+7i74+7i85
Bitfile for 6i25+7i74+7i85
Category: Driver Boards
- tommylight

09 Aug 2025 17:11
Replied by tommylight on topic Linux based all in one anyone see whats under the hood yet?
Linux based all in one anyone see whats under the hood yet?
Category: Computers and Hardware
- Cncninja
- Cncninja
09 Aug 2025 17:03
Linux based all in one anyone see whats under the hood yet? was created by Cncninja
Linux based all in one anyone see whats under the hood yet?
Category: Computers and Hardware
- MaHa
- MaHa
09 Aug 2025 16:33
- Hakan
- Hakan
09 Aug 2025 16:24 - 09 Aug 2025 16:32
Replied by Hakan on topic Amplifier Fault ECT60 Closed Loop
Amplifier Fault ECT60 Closed Loop
Category: EtherCAT
- bridges67
- bridges67
09 Aug 2025 16:09
- snowgoer540

09 Aug 2025 15:31
Replied by snowgoer540 on topic PathPilot V2 source code
PathPilot V2 source code
Category: PathPilot
- juergen-home
- juergen-home
09 Aug 2025 15:13 - 12 Aug 2025 09:15
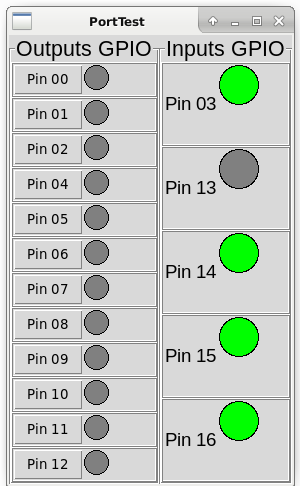
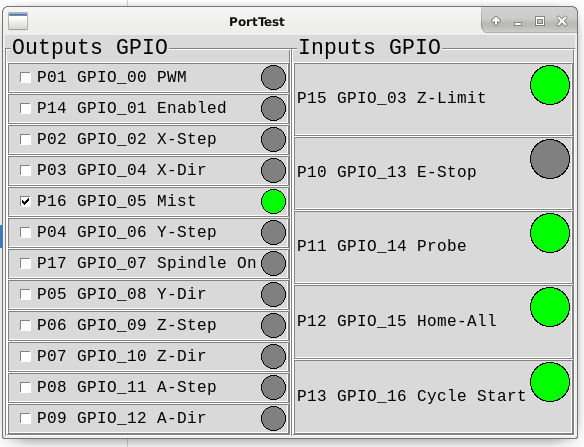
Replied by juergen-home on topic Parallel Port Tester
Parallel Port Tester
Category: Computers and Hardware
- Firehunter
- Firehunter
09 Aug 2025 14:40
- snowgoer540
09 Aug 2025 14:38 - 09 Aug 2025 14:40
Replied by snowgoer540 on topic PathPilot V2 source code
PathPilot V2 source code
Category: PathPilot
Time to create page: 0.497 seconds