Search Results (Searched for: )
- tommylight

08 Jan 2025 02:43
Replied by tommylight on topic New installation only boot with "nomodeset"
New installation only boot with "nomodeset"
Category: General LinuxCNC Questions
- tommylight
08 Jan 2025 02:35
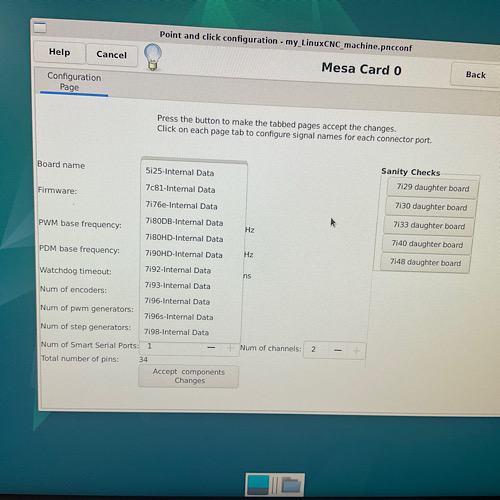
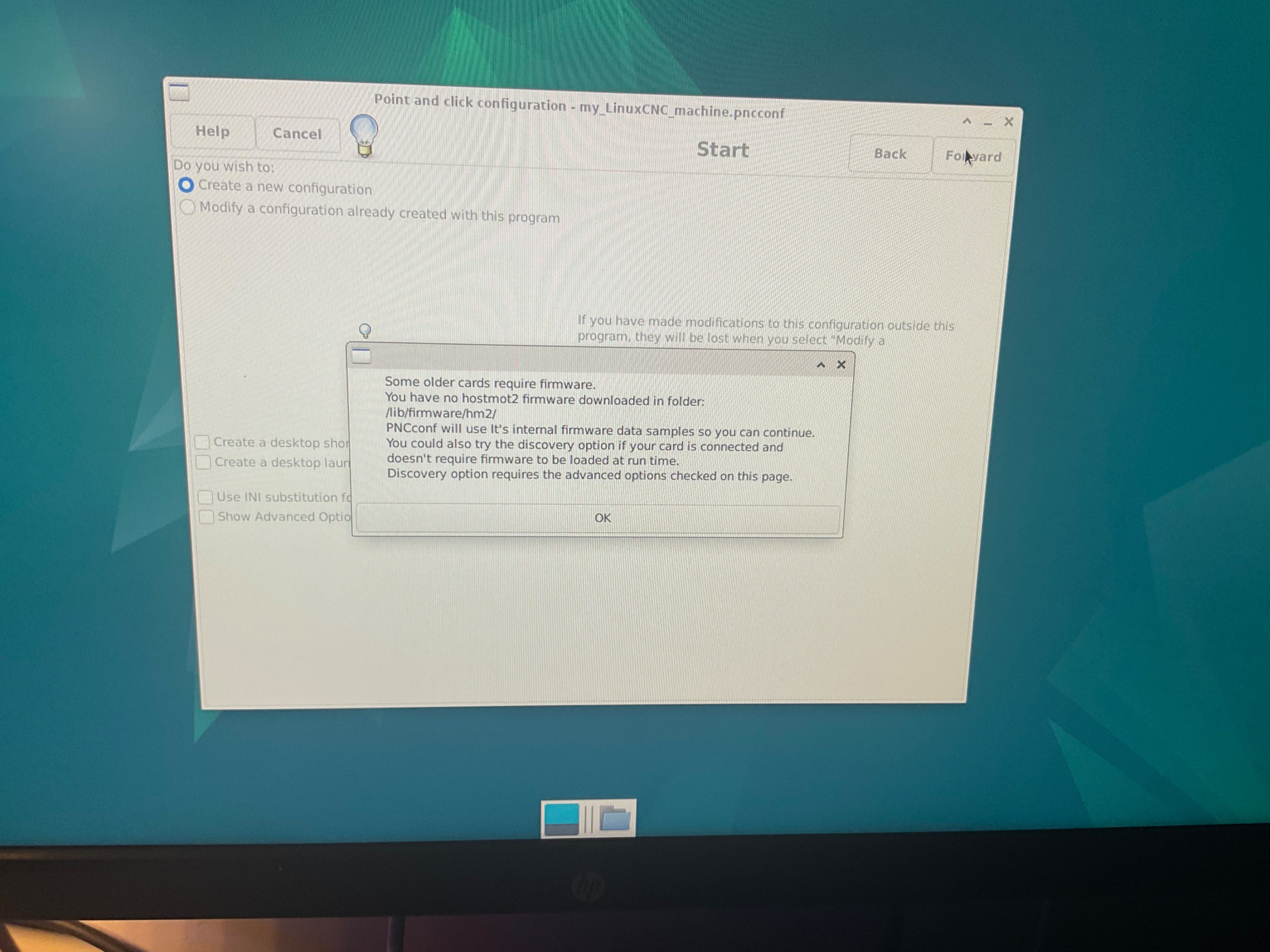
Replied by tommylight on topic PcConfig my mesa board is not listed.
PcConfig my mesa board is not listed.
Category: Installing LinuxCNC
- Jdolecki
- Jdolecki
08 Jan 2025 02:25
PcConfig my mesa board is not listed. was created by Jdolecki
PcConfig my mesa board is not listed.
Category: Installing LinuxCNC
- blazini36
- blazini36
08 Jan 2025 01:59
- blazini36
- blazini36
08 Jan 2025 01:12
Replied by blazini36 on topic Building and configuring a stmbl v5
Building and configuring a stmbl v5
Category: Driver Boards
- jst
- jst
08 Jan 2025 00:41
Replied by jst on topic Building and configuring a stmbl v5
Building and configuring a stmbl v5
Category: Driver Boards
- PCW

08 Jan 2025 00:41
- PCW
08 Jan 2025 00:34
Replied by PCW on topic LinuxCNC on Raspberry Pi 5
LinuxCNC on Raspberry Pi 5
Category: Installing LinuxCNC
- PCW
08 Jan 2025 00:30
Replied by PCW on topic Where are the stepper direction pins hiding in 7196S HAL?
Where are the stepper direction pins hiding in 7196S HAL?
Category: Basic Configuration
- phillc54

08 Jan 2025 00:22
Replied by phillc54 on topic Cut Recovery Not Consistently Triggering
Cut Recovery Not Consistently Triggering
Category: Plasmac
- JimS
- JimS
08 Jan 2025 00:21
- resmond
- resmond
08 Jan 2025 00:13
Replied by resmond on topic LinuxCNC on Raspberry Pi 5
LinuxCNC on Raspberry Pi 5
Category: Installing LinuxCNC

- blazini36
- blazini36
07 Jan 2025 23:48
Replied by blazini36 on topic Building and configuring a stmbl v5
Building and configuring a stmbl v5
Category: Driver Boards
- NotAllThere
07 Jan 2025 23:25
Replied by NotAllThere on topic Simple Z touch off generating empty error [SOLVED]
Simple Z touch off generating empty error [SOLVED]
Category: Basic Configuration
- gardenweazel

07 Jan 2025 23:07
Replied by gardenweazel on topic QTDesigner PATH issue
QTDesigner PATH issue
Category: General LinuxCNC Questions
Time to create page: 0.826 seconds