Search Results (Searched for: )
- Aciera

14 Jul 2024 08:41 - 14 Jul 2024 08:42
- cmorley
- cmorley
14 Jul 2024 07:19
Replied by cmorley on topic I got an err when enable USE VIRTUAL Keyboard
I got an err when enable USE VIRTUAL Keyboard
Category: Other User Interfaces
- GeckoWorks
- GeckoWorks
14 Jul 2024 05:51
Replied by GeckoWorks on topic Sorry, Another 'Which Mesa?' Post. (Yes, I read Spumco's magnificient guide)
Sorry, Another 'Which Mesa?' Post. (Yes, I read Spumco's magnificient guide)
Category: Driver Boards
- Altenthaler1988
- Altenthaler1988
14 Jul 2024 05:10 - 14 Jul 2024 05:11
Replied by Altenthaler1988 on topic qtplasmac "torch not showing"
qtplasmac "torch not showing"
Category: Plasmac
- PCW

14 Jul 2024 05:06
- PCW
14 Jul 2024 05:02
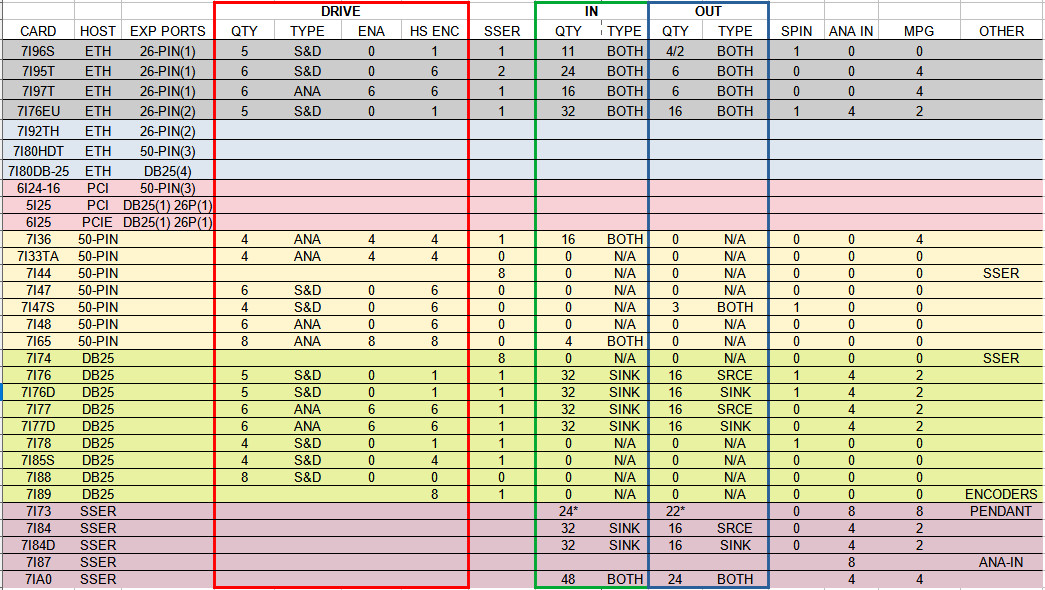
Replied by PCW on topic Which Mesa Card Should I Buy?
Which Mesa Card Should I Buy?
Category: Driver Boards
- GeckoWorks
- GeckoWorks
14 Jul 2024 04:37 - 14 Jul 2024 04:39
Replied by GeckoWorks on topic Which Mesa Card Should I Buy?
Which Mesa Card Should I Buy?
Category: Driver Boards
- GeckoWorks
- GeckoWorks
14 Jul 2024 04:31
Replied by GeckoWorks on topic Sorry, Another 'Which Mesa?' Post. (Yes, I read Spumco's magnificient guide)
Sorry, Another 'Which Mesa?' Post. (Yes, I read Spumco's magnificient guide)
Category: Driver Boards
- Felipe5Sosa
- Felipe5Sosa
14 Jul 2024 03:44 - 15 Jul 2024 03:12
I got an err when enable USE VIRTUAL Keyboard was created by Felipe5Sosa
I got an err when enable USE VIRTUAL Keyboard
Category: Other User Interfaces
- B.Reilly01
- B.Reilly01
14 Jul 2024 02:51
Replied by B.Reilly01 on topic Built my .ui, works in SIM, how do I move it to the machine?
Built my .ui, works in SIM, how do I move it to the machine?
Category: QtPyVCP
- lmclaren
- lmclaren
14 Jul 2024 01:35
Replied by lmclaren on topic Problems with Lichuan Ethercat servo drive
Problems with Lichuan Ethercat servo drive
Category: EtherCAT
- AirRacer
- AirRacer
14 Jul 2024 01:19
Replied by AirRacer on topic MesCT For Analog Servos
MesCT For Analog Servos
Category: Configuration Tools
- scotta

14 Jul 2024 01:09
- tom_no
13 Jul 2024 23:46
Manual tool change from M6 ATC Python remap was created by tom_no
Manual tool change from M6 ATC Python remap
Category: Advanced Configuration
- Darium
- Darium
13 Jul 2024 22:48
Automatic tool change arm stepgen was created by Darium
Automatic tool change arm stepgen
Category: General LinuxCNC Questions
Time to create page: 0.496 seconds