Hypersensing questions
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 12054
- Thank you received: 4114
22 Apr 2020 11:32 - 22 Apr 2020 11:32 #165074
by rodw
Replied by rodw on topic Hypersensing questions
Well there is 300 odd volts floating around on the DC side which says its not a good idea. I just think it should come on at the start of a job and go off at the end of it. Normally, I'd use spindle on, but I don't tink that works cos probing happens before it. I'll work it out. It was easier to just remove the relay ...
Last edit: 22 Apr 2020 11:32 by rodw.
Please Log in or Create an account to join the conversation.
- snowgoer540
-
 Topic Author
Topic Author
- Offline
- Moderator
-

Less
More
- Posts: 2555
- Thank you received: 888
22 Apr 2020 13:28 #165101
by snowgoer540
Oh yea I always forget about the pesky torch.
How would it trigger for the probe tests, etc?
Replied by snowgoer540 on topic Hypersensing questions
Well there is 300 odd volts floating around on the DC side which says its not a good idea. I just think it should come on at the start of a job and go off at the end of it. Normally, I'd use spindle on, but I don't tink that works cos probing happens before it. I'll work it out. It was easier to just remove the relay ...
Oh yea I always forget about the pesky torch.
How would it trigger for the probe tests, etc?
Please Log in or Create an account to join the conversation.
- Uthayne
- Offline
- Premium Member
-

Less
More
- Posts: 147
- Thank you received: 49
22 Apr 2020 22:57 #165161
by Uthayne
Replied by Uthayne on topic Hypersensing questions
I got my 22kOhm 10W resistor in (I bought a few different sizes/power ratings, decided to step it up to keep things extra cool) and wired it up.
Did a series of hole patterns without any fault and then successfully cut out some house numbers.
I saved the halscope data file only to find out that the "Open Data File" function was never completed so I can't view it. I'll take some more data next time and screenshot.
Did a series of hole patterns without any fault and then successfully cut out some house numbers.
I saved the halscope data file only to find out that the "Open Data File" function was never completed so I can't view it. I'll take some more data next time and screenshot.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 12054
- Thank you received: 4114
22 Apr 2020 23:21 #165163
by rodw
Replied by rodw on topic Hypersensing questions
yes, you need to do screenshots. I have imported that data into a spreadsheet before though. Which Component were you using? The original? or the revised?
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5283
23 Apr 2020 00:20 #165168
by PCW
Replied by PCW on topic Hypersensing questions
If 25V full scale and 1 mA full scale sense current are a good
choice I could make a THCAD version with the right resistors so
no added parts are needed...
choice I could make a THCAD version with the right resistors so
no added parts are needed...
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 12054
- Thank you received: 4114
23 Apr 2020 01:08 #165170
by rodw
I think we should get feedback from Snowgoer as well. I think also that using a moving average will help smooth the signal and remove some of the noise. Here is a plot of average volts with N=10. I found N=5 was still a bit twitchy.
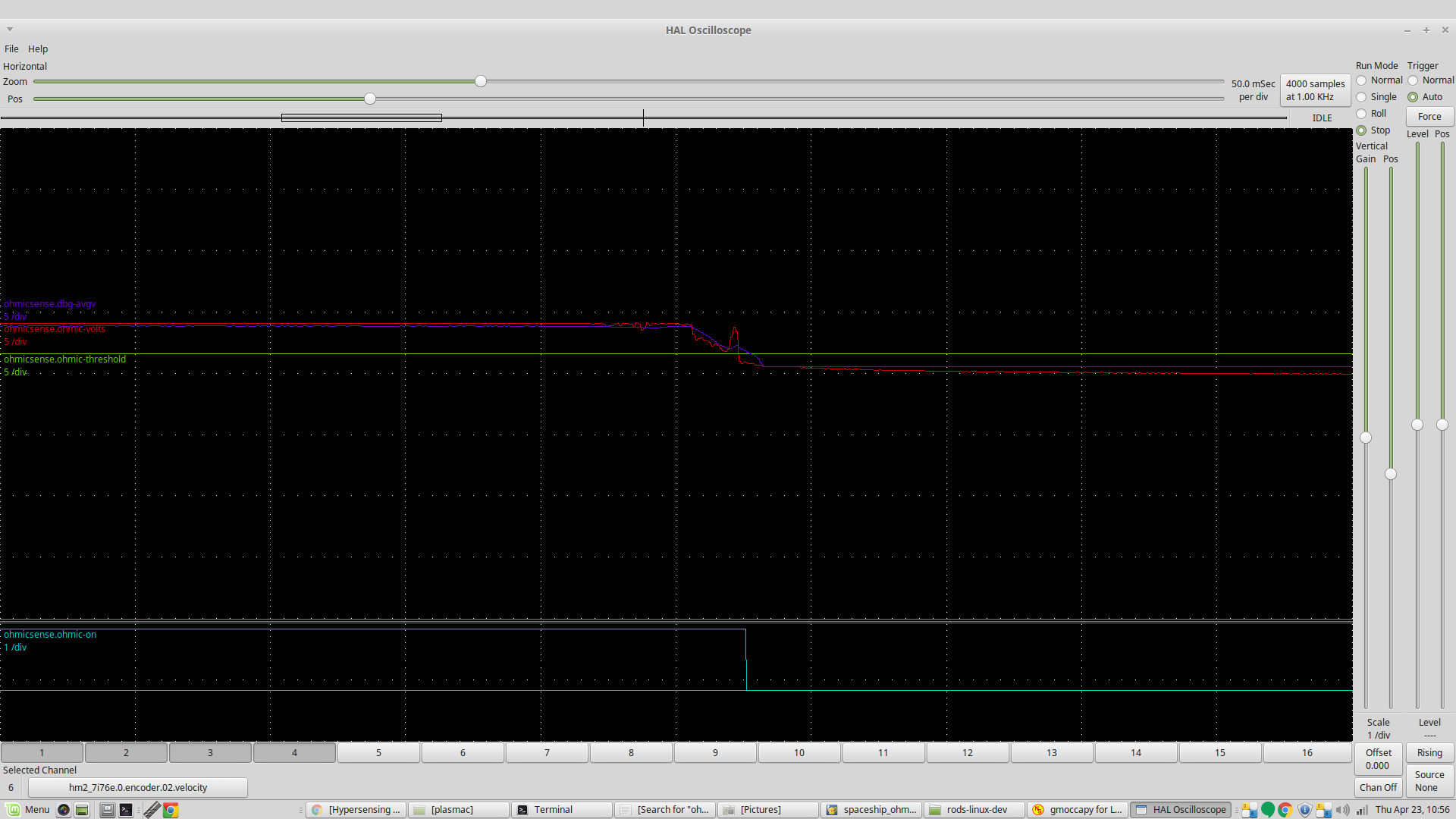
Blue line is the average, red line is actual volts... I've also added some pins so I can turn the relay on when motion.motion-type > 0
That lets the relay turn on when an axis moves so it can start averaging volts before a probe event.
I'm still not done playing here though.
Peter is smoothing the signal wise do you think?
Replied by rodw on topic Hypersensing questions
If 25V full scale and 1 mA full scale sense current are a good
choice I could make a THCAD version with the right resistors so
no added parts are needed...
I think we should get feedback from Snowgoer as well. I think also that using a moving average will help smooth the signal and remove some of the noise. Here is a plot of average volts with N=10. I found N=5 was still a bit twitchy.
Blue line is the average, red line is actual volts... I've also added some pins so I can turn the relay on when motion.motion-type > 0
That lets the relay turn on when an axis moves so it can start averaging volts before a probe event.
I'm still not done playing here though.
Peter is smoothing the signal wise do you think?
Please Log in or Create an account to join the conversation.
- phillc54
-

- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
23 Apr 2020 01:28 #165172
by phillc54
Replied by phillc54 on topic Hypersensing questions
I don't think smoothing the signal is wise if it causes too much delay thus increasing overrun.
You could slow your probing down which only works after probe height is reached.
The other issue is if your material is bucked enough to go above probe height you will increase the risk of crashing.
You could slow your probing down which only works after probe height is reached.
The other issue is if your material is bucked enough to go above probe height you will increase the risk of crashing.
Please Log in or Create an account to join the conversation.
- snowgoer540
-
Topic Author
- Offline
- Moderator
-
Less
More
- Posts: 2555
- Thank you received: 888
23 Apr 2020 02:05 #165175
by snowgoer540
My resistors are delayed Mouser was supposed to ship yesterday with overnight to make up for the delay.. then today... which didn’t happen. Really hoping I get them by Friday so I can do some testing on the weekend. But it is what it is in the world today.
Mouser was supposed to ship yesterday with overnight to make up for the delay.. then today... which didn’t happen. Really hoping I get them by Friday so I can do some testing on the weekend. But it is what it is in the world today.
I did get a nice solid state relay to control the power supply though so at least I’ll get that wired in tomorrow maybe.
Replied by snowgoer540 on topic Hypersensing questions
If 25V full scale and 1 mA full scale sense current are a good
choice I could make a THCAD version with the right resistors so
no added parts are needed...
I think we should get feedback from Snowgoer as well. I think also that using a moving average will help smooth the signal and remove some of the noise. Here is a plot of average volts with N=10. I found N=5 was still a bit twitchy.
Blue line is the average, red line is actual volts... I've also added some pins so I can turn the relay on when motion.motion-type > 0
That lets the relay turn on when an axis moves so it can start averaging volts before a probe event.
I'm still not done playing here though.
Peter is smoothing the signal wise do you think?
My resistors are delayed
Mouser was supposed to ship yesterday with overnight to make up for the delay.. then today... which didn’t happen. Really hoping I get them by Friday so I can do some testing on the weekend. But it is what it is in the world today.I did get a nice solid state relay to control the power supply though so at least I’ll get that wired in tomorrow maybe.
Please Log in or Create an account to join the conversation.
- snowgoer540
-
Topic Author
- Offline
- Moderator
-
Less
More
- Posts: 2555
- Thank you received: 888
23 Apr 2020 02:06 - 23 Apr 2020 02:07 #165176
by snowgoer540
I’m not sure smoothing it out is the answer yet either. I plan to test with the original ohmic comp file, because other than the wet torch issue, everything seemed to be working ... but I’m rather new to ohmic sensing so maybe I don’t know what I don’t know yet ..
Replied by snowgoer540 on topic Hypersensing questions
I don't think smoothing the signal is wise if it causes too much delay thus increasing overrun.
You could slow your probing down which only works after probe height is reached.
The other issue is if your material is bucked enough to go above probe height you will increase the risk of crashing.
I’m not sure smoothing it out is the answer yet either. I plan to test with the original ohmic comp file, because other than the wet torch issue, everything seemed to be working ... but I’m rather new to ohmic sensing so maybe I don’t know what I don’t know yet ..
Last edit: 23 Apr 2020 02:07 by snowgoer540.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 12054
- Thank you received: 4114
23 Apr 2020 03:16 #165179
by rodw
I think you said it is then travelling at 0.001mm per servo cycle. Absolute worst case is the surface is out 0.01mm but in reality, the voltage is dropping very quickly from the full scale reading so I would expect any delay is a lot less than 10 servo cycles due to the added weight of the last couple of readings. What we don't want is the probe signal to oscillate on and off because of voltage spikes when contact breaks.
What I'd like to do is to come up with a method that self learns and auto calibrates continuously so the concept of a threshold is rendered obsolete. As it is, we have done away with the low threshold, we just need to do away with the high threshold now.
Replied by rodw on topic Hypersensing questions
These are not valid concerns. We only use the smoothed signal at the end of probing so the torch is moving away from the material. There is no possibility of a crash. Also, we no longer use the low threshold so the sensitivity of the new method is actually increased.I don't think smoothing the signal is wise if it causes too much delay thus increasing overrun.
You could slow your probing down which only works after probe height is reached.
The other issue is if your material is bucked enough to go above probe height you will increase the risk of crashing.
I think you said it is then travelling at 0.001mm per servo cycle. Absolute worst case is the surface is out 0.01mm but in reality, the voltage is dropping very quickly from the full scale reading so I would expect any delay is a lot less than 10 servo cycles due to the added weight of the last couple of readings. What we don't want is the probe signal to oscillate on and off because of voltage spikes when contact breaks.
What I'd like to do is to come up with a method that self learns and auto calibrates continuously so the concept of a threshold is rendered obsolete. As it is, we have done away with the low threshold, we just need to do away with the high threshold now.
Please Log in or Create an account to join the conversation.
Moderators: snowgoer540
Time to create page: 0.184 seconds