- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
- Dave3891
- Offline
- Senior Member
-

Less
More
- Posts: 56
- Thank you received: 7
24 Feb 2026 04:09 - 24 Feb 2026 04:10 #343377
by Dave3891
Replied by Dave3891 on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Is it recommended to use any FF1 with RioCore? It is defaulted to 0.0 in the generator but a lot of other stepper drivers seem to use FF1=1.0
Also would I need to use the P=250 at all or is that the best setting?
Also would I need to use the P=250 at all or is that the best setting?
Last edit: 24 Feb 2026 04:10 by Dave3891.
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-

Less
More
- Posts: 745
- Thank you received: 468
24 Feb 2026 05:11 #343378
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
These are just default values that work on all my machines.
Please Log in or Create an account to join the conversation.
- epineh
- Offline
- Senior Member
-
Less
More
- Posts: 76
- Thank you received: 27
05 Mar 2026 11:49 #343887
by epineh
Replied by epineh on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
You are doing awesome things, I plan to start testing Riosub in the near future, hopefully I can contribute something useful !
The following user(s) said Thank You: meister
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 468
05 Mar 2026 12:09 #343888
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Thanks.
at the moment, i rewrite the riosub stuff in the dev branch and the riosub plugin will be removed in the next release.
it will be replaced by uartsub+uart/satmcu (i need other names for that plugins, something with 'satellite').
The reason is that you can then edit everything in one configuration and thus always have the overall picture in front of you.
Then you can also use microcontrollers as satellite-board and configure them in the Flow GUI.
at the moment, i rewrite the riosub stuff in the dev branch and the riosub plugin will be removed in the next release.
it will be replaced by uartsub+uart/satmcu (i need other names for that plugins, something with 'satellite').
The reason is that you can then edit everything in one configuration and thus always have the overall picture in front of you.
Then you can also use microcontrollers as satellite-board and configure them in the Flow GUI.
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 468
05 Mar 2026 12:27 - 05 Mar 2026 12:29 #343890
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
something like this:
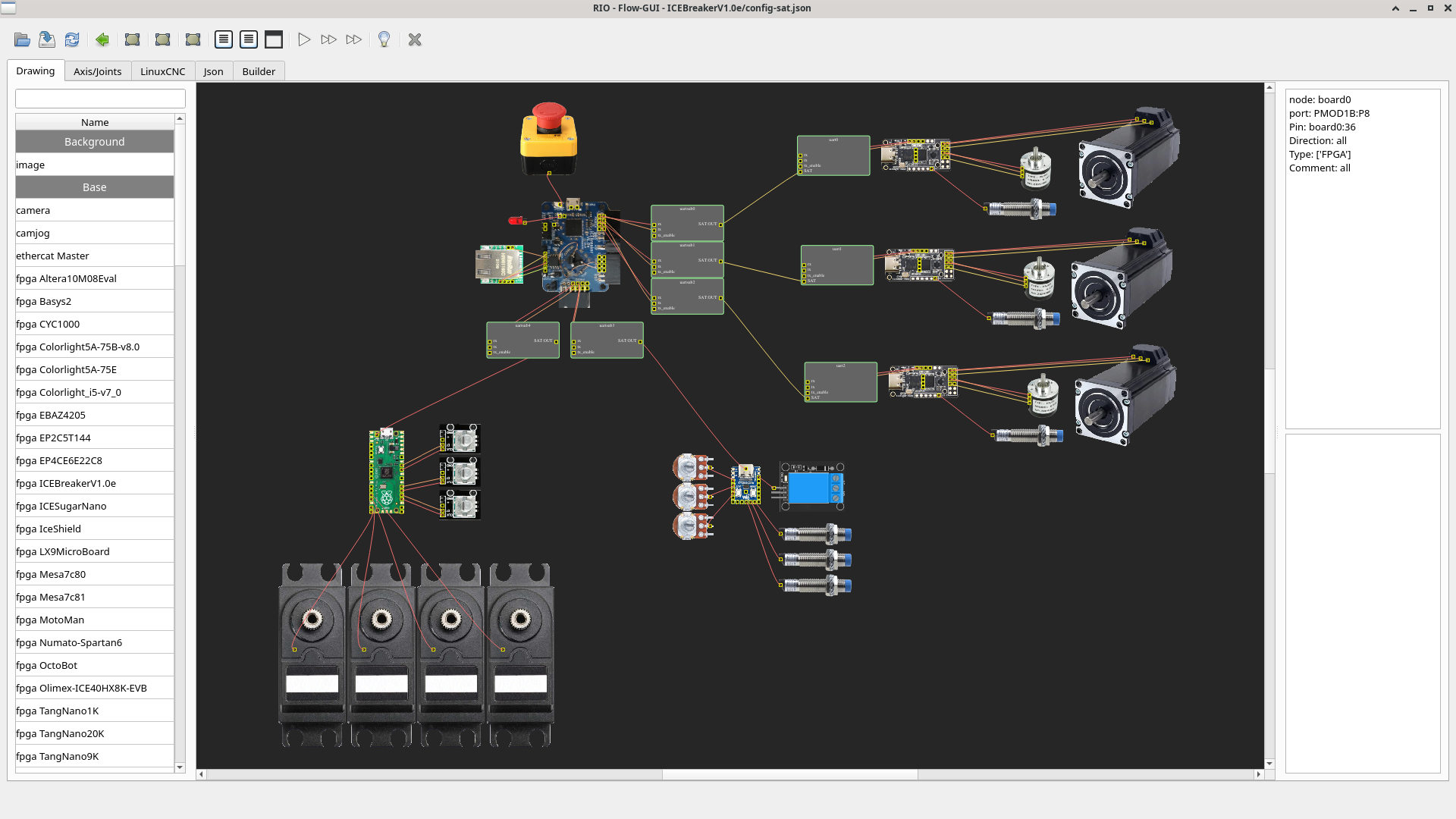
and it will generate the code for all FPGA's and MCU's
the interlinks are RS422 over RJ45 cables (like smart-serial)
and it will generate the code for all FPGA's and MCU's
the interlinks are RS422 over RJ45 cables (like smart-serial)
Attachments:
Last edit: 05 Mar 2026 12:29 by meister.
The following user(s) said Thank You: epineh, tommylight, kzali
Please Log in or Create an account to join the conversation.
- epineh
- Offline
- Senior Member
-
Less
More
- Posts: 76
- Thank you received: 27
06 Mar 2026 10:45 #343935
by epineh
Replied by epineh on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Oh very nice, one of those micro's look like the waveshare 2040zero and the other a pi pico? I have been playing around with using the pico, probably a 2350b with 48GPIO as an expansion port via SPI and using a SYNC pin from the nano to take snapshots at 1KHz intervals to keep readings accurate for encoder positions. The Pico's are awesome for this kind of work, serious cheap hardware. I also plan to use Tang to SPI to pico bus topology for expansion boards, mainly IO, if I want step/direction I will try RioSub, most of my machines are closed loop to the controller so only pwm/dir to Hbridges, but I have friends that want to use step/dir with commercial drives. I will test this on my own machines, let me know if you want anything specific for me to test.
Cheers.
Russell.
Cheers.
Russell.
Please Log in or Create an account to join the conversation.
- epineh
- Offline
- Senior Member
-
Less
More
- Posts: 76
- Thank you received: 27
06 Mar 2026 10:59 #343936
by epineh
Replied by epineh on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
What comms layer are you thinking for data between the FPGA and MCU? You mention rs422, so I assume high bandwith serial over differential driver? I was going to use SPI with included SYNC signal for timing integrity but serial will use two FPGA pins and a differential driver instead of my scheme that will use 5 pins. I love the Tang Nano, cheap, and great toolchain. If I could keep using it then life would be good, pin count is it's worst enemy!
Cheers.
Russell.
Cheers.
Russell.
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 468
06 Mar 2026 11:53 #343939
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
yes, at the moment i play with 1Mbit over RS422-Drivers and the exsisting uart plugin, i allready test 2.5Mbit without problems between two FPGA's.
The protocol is the same generated like between FPGA and PC plus checksum for serial.
Since only the bare minimum is transferred, the delays are extremely small.
the Firmware generator supports RP2040 (incl. waveshare zero) and ESP32 MCU's
based on Arduino toolchain, but you can use the interface stuff (pure c) for other controllers and own drivers that rio can not generate as a template.
I used RS422 so that simple cables (network/RJ45) can be used to bridge longer distances without any problems. This means, for example, that the step/dir generators can be attached directly to the motor if they have built-in drivers.
I am currently testing an MPG based on pico, which is also connected via RS422 (including power supply).
The protocol is the same generated like between FPGA and PC plus checksum for serial.
Since only the bare minimum is transferred, the delays are extremely small.
the Firmware generator supports RP2040 (incl. waveshare zero) and ESP32 MCU's
based on Arduino toolchain, but you can use the interface stuff (pure c) for other controllers and own drivers that rio can not generate as a template.
I used RS422 so that simple cables (network/RJ45) can be used to bridge longer distances without any problems. This means, for example, that the step/dir generators can be attached directly to the motor if they have built-in drivers.
I am currently testing an MPG based on pico, which is also connected via RS422 (including power supply).
The following user(s) said Thank You: jpn9900
Please Log in or Create an account to join the conversation.
- kostas
-
- Offline
- Junior Member
-

Less
More
- Posts: 32
- Thank you received: 6
06 Mar 2026 20:07 #343951
by kostas
Replied by kostas on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
I tried riocore with a Tang nano 9k last year, when I first read about it. I loved the idea and I think you have done a fantastic job so far.
So a big thank you, although I have not done anything productive with LinunxCNC and riocore yet, mainly because I already have some Mesa cards that I use in my machines and not the time that I would like to have to start experimenting with a fun project with riocore. I love the idea that for simple projects I could potentially use riocore with a cheap FPGA board though, so hopefully I'll do this in the near future!
I have a project in mind right now though, that would ideally use a microcontroller for sending commands to the FPGA for driving two motors and I would like to know if I could potentially connect an ESP32-S3 or ESP32-P4 that I already have. I'm only familiar with Arduino framework so far and I tried to dive further in ESP-IDF in the past but that was more hard for my current experience. Do you think it would be possible and fairly simple to communicate an ESP32 board with the Tang nano over SPI, like your LinuxCNC driver does?
Kostas
So a big thank you, although I have not done anything productive with LinunxCNC and riocore yet, mainly because I already have some Mesa cards that I use in my machines and not the time that I would like to have to start experimenting with a fun project with riocore. I love the idea that for simple projects I could potentially use riocore with a cheap FPGA board though, so hopefully I'll do this in the near future!
I have a project in mind right now though, that would ideally use a microcontroller for sending commands to the FPGA for driving two motors and I would like to know if I could potentially connect an ESP32-S3 or ESP32-P4 that I already have. I'm only familiar with Arduino framework so far and I tried to dive further in ESP-IDF in the past but that was more hard for my current experience. Do you think it would be possible and fairly simple to communicate an ESP32 board with the Tang nano over SPI, like your LinuxCNC driver does?
Kostas
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 468
07 Mar 2026 10:14 #343983
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Hi kostas,
it's possible, there are already generated parts to drive the boards without linuxcnc (from Python/C, over MQTT / JS / ROS).
there is no generator for a microcontroller master, but it's not so hard to use the C client as an template for that.
But if you want to drive motors in Position mode, you need an PID controller inside the microcontroller, not so hard, but you need to write one.
Olli
it's possible, there are already generated parts to drive the boards without linuxcnc (from Python/C, over MQTT / JS / ROS).
there is no generator for a microcontroller master, but it's not so hard to use the C client as an template for that.
But if you want to drive motors in Position mode, you need an PID controller inside the microcontroller, not so hard, but you need to write one.
Olli
The following user(s) said Thank You: kostas
Please Log in or Create an account to join the conversation.
- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Time to create page: 0.176 seconds