Trajectory Planner using Ruckig Lib
- Aciera
-

- Offline
- Administrator
-

- Posts: 4755
- Thank you received: 2135
If you still keep core dump, i can edit the appimage to run Using POSIX non realtime
How do I do that?
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

- Posts: 21747
- Thank you received: 7433
Please Log in or Create an account to join the conversation.
- tiagounderground
- Offline
- Junior Member
-

- Posts: 21
- Thank you received: 13
Please Log in or Create an account to join the conversation.
- Grotius
-

- Offline
- Platinum Member
-

- Posts: 2419
- Thank you received: 2348
How do I do that?
Using the cmake system, compile everything and then run it. When u use no sudo for the "cmake make install" step,
it will run non-realtime. I will do that, but now i have no time to do that. Family visit.
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
I think it's not related to rtai or something like that.
@Tia,
same here on the rt kernel on debian 12, try to start the AppImage the terminal just hangs there, no output at all
Maybe i will try it myself on a virtual machine. If this works, then it supposed to work at other places.
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
I found a paper that has the info to create a 3d clothoid 4 segment spline. Ideal to create 3d fillets for gcode.
Now is anyone able to help convert this paper into c or c++ code?
clothoid_3d_paper
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
Today i was creating the G5 for spline.
Here it tells us to use incremental offset's for i,j in g17 plane. It seems to lcnc uses a 2d spline.
g5 linuxcnc
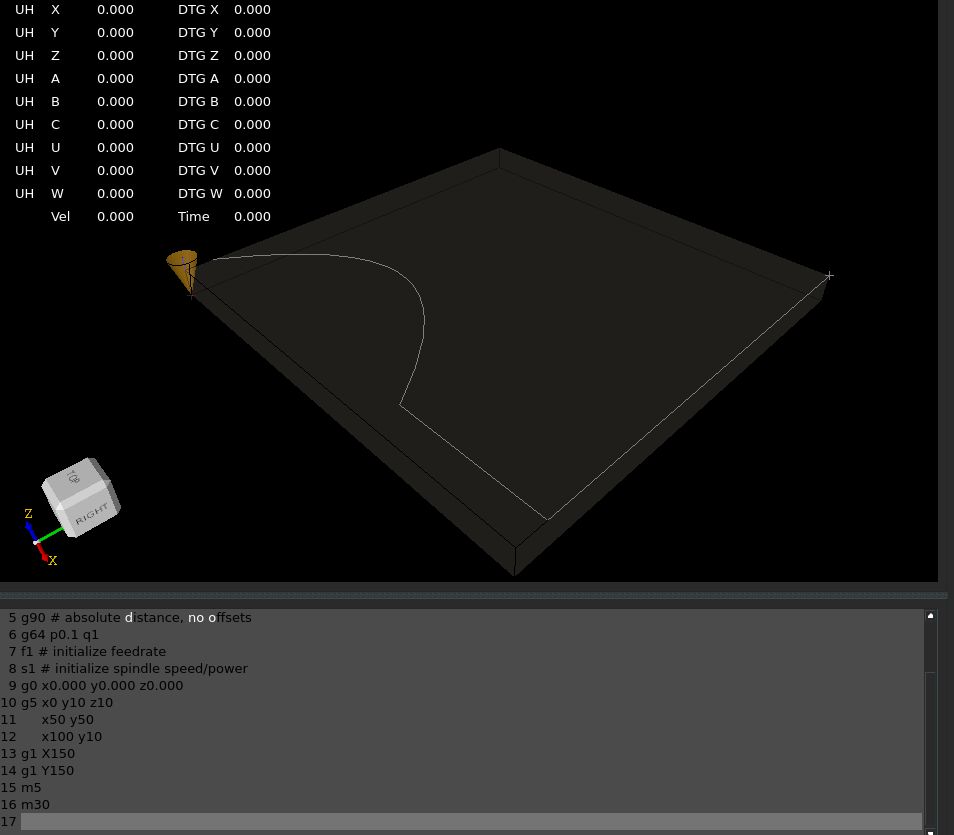
Then i thought why not use absolute point values for a spline?
Here is my proposal to use a spline in gcode.
It start with a G5. Then every line has a x,y,z point, until another gcode appears.
And the result :
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4755
- Thank you received: 2135
You probably know how it is with GCode and Splines. Decades ago, when memory was expensive, they were interesting because they reduce file size (as do arcs). As discussed a few pages back on this thread, modern multiaxis CAM/ Postprocessors produce G1 line segments only, they don't even bother with G2/G3 arcs (R vs IJK, Absolute vs Relative). Since processing power and memory have become so cheap the interest in splines has all but disappeared. That is why nobody really uses them. If you asked somebody to create a postprocessor that uses splines, I guarantee the question would be: WHY?Here is my proposal to use a spline in gcode.
So, unless you have found a new and compelling reason for using splines instead of lines (and arcs) you are flogging a dead horse.
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
That's the case. Flogging a dead horse.
I also never used splines in gcode.
However we need a 4pnt spline to do the exotic path blending fillets where the clothoids are out of plane, or invalid.
Integrating the spline is not that much work.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4755
- Thank you received: 2135
However we need a 4pnt spline to do the exotic path blending fillets where the clothoids are out of plane, or invalid.
That is what I suspected. I don't think there would be many objections to modifying spline syntax if it helped getting jolt limiting path blending for multi axis gcode working.
I'm afraid I can't help you with implementing the linked 3d clothoid algorithm.
Please Log in or Create an account to join the conversation.