Search Results (Searched for: raspberry pi 3)
- rodw

24 Jul 2026 08:21
- rodw
24 Jul 2026 07:55
- Todd Zuercher

23 Jul 2026 09:53
Replied by Todd Zuercher on topic using linuxcnc on a raspberry pi to control a boxford 250pc lathe
using linuxcnc on a raspberry pi to control a boxford 250pc lathe
Category: General LinuxCNC Questions
- Zipdodar
- Zipdodar
23 Jul 2026 08:29 - 23 Jul 2026 08:29
- Zipdodar
- Zipdodar
23 Jul 2026 08:11
- klopp
- klopp
20 Jul 2026 18:08
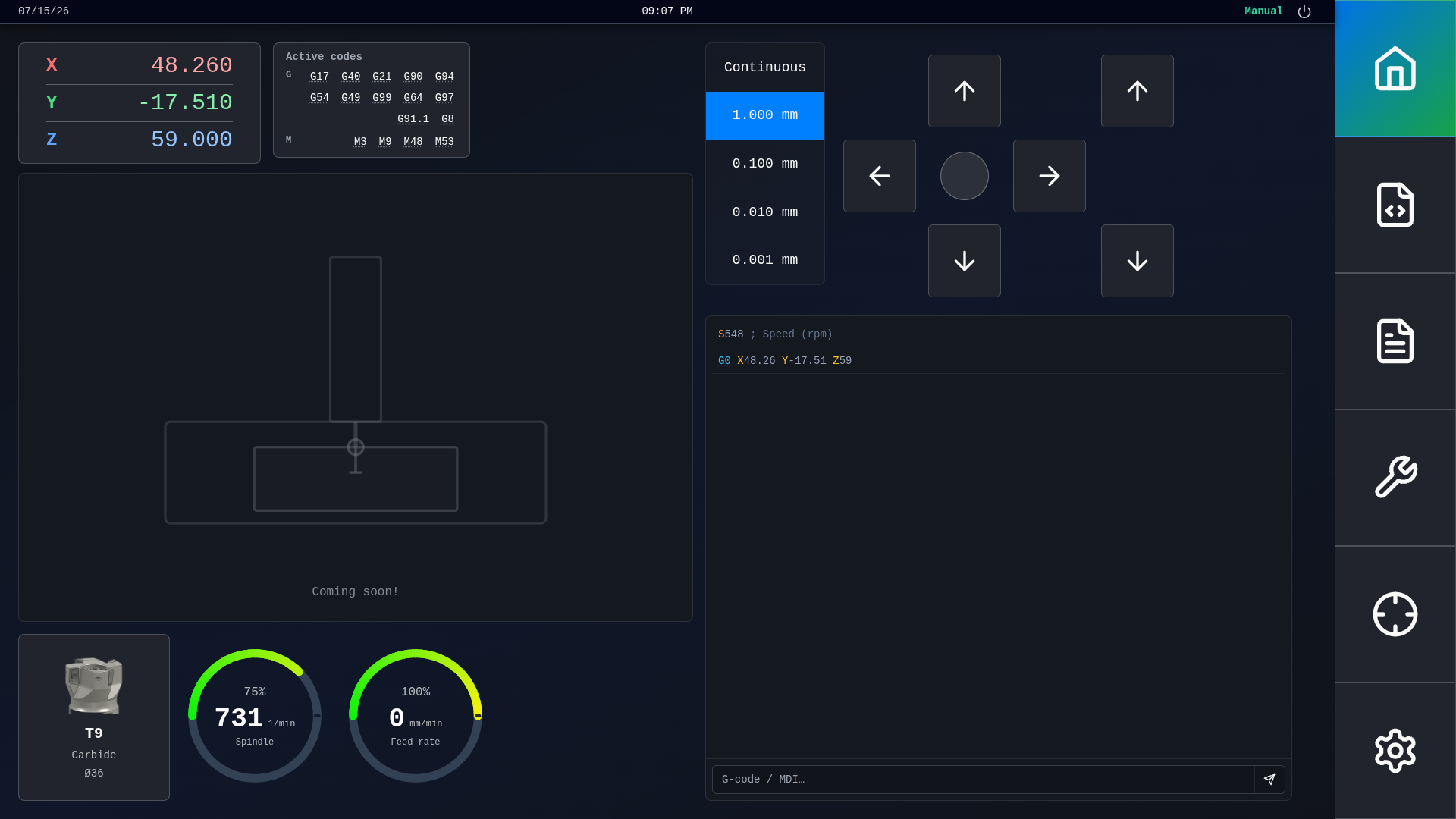
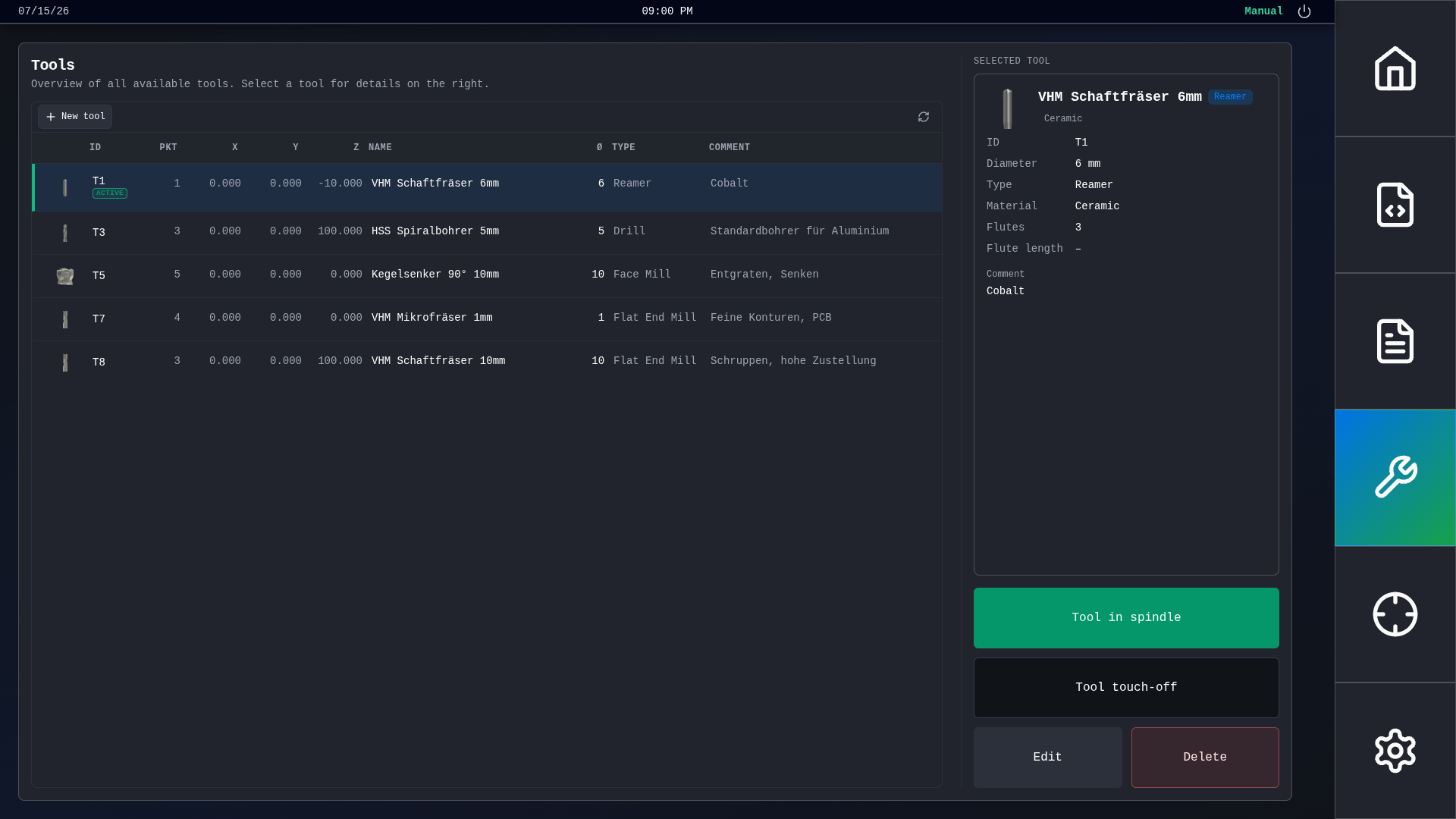
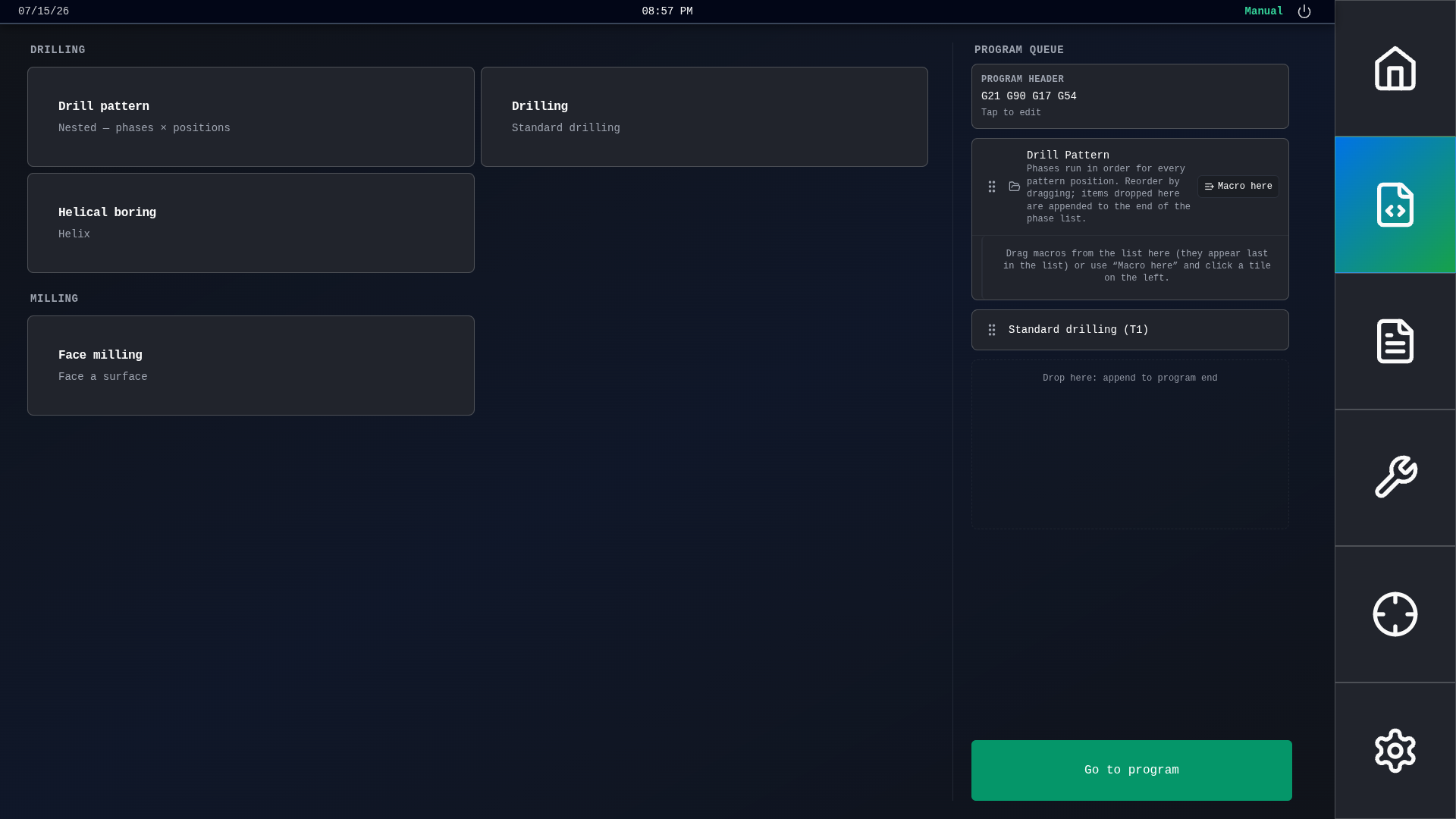
lcncgui simple web based linuxcnc GUI was created by klopp
lcncgui simple web based linuxcnc GUI
Category: Other User Interfaces
- andreas0480
- andreas0480
20 Jul 2026 16:41
- Rykagon
- Rykagon
12 Jul 2026 19:06
Successful Raspberry Pi 4 Trixie LinuxCNC install. was created by Rykagon
Successful Raspberry Pi 4 Trixie LinuxCNC install.
Category: Installing LinuxCNC
- HIBA
- HIBA
10 Jul 2026 21:46
- Rykagon
- Rykagon
06 Jul 2026 18:03
Newbie asking for resources and advice was created by Rykagon
Newbie asking for resources and advice
Category: General LinuxCNC Questions
- galmiklos
- galmiklos
24 Jun 2026 14:14 - 24 Jun 2026 14:21
Replied by galmiklos on topic Cannot get out of Estop
Cannot get out of Estop
Category: General LinuxCNC Questions
")
- tuxcnc
- tuxcnc
21 Jun 2026 08:31
Replied by tuxcnc on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- NT4Boy
- NT4Boy
16 Jun 2026 15:21
Replied by NT4Boy on topic HURCO KMB-1 Control Update
HURCO KMB-1 Control Update
Category: Milling Machines
- emmaleo
- emmaleo
03 Jun 2026 00:32
What PC or Hardware Works Best for LinuxCNC? was created by emmaleo
What PC or Hardware Works Best for LinuxCNC?
Category: Computers and Hardware
- Muecke

31 May 2026 18:16
Time to create page: 0.751 seconds