Search Results (Searched for: )
- Cant do this anymore bye all

06 Jun 2024 02:32
Replied by Cant do this anymore bye all on topic linuxcnc_2.9.1-amd64.hybrid.iso Intallation fail
linuxcnc_2.9.1-amd64.hybrid.iso Intallation fail
Category: Installing LinuxCNC
- cmorley
- cmorley
06 Jun 2024 02:04
- tommylight

06 Jun 2024 01:45
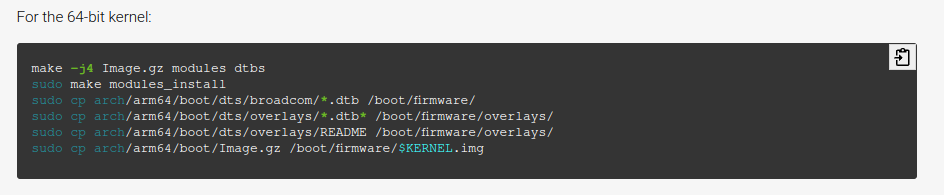
Replied by tommylight on topic Real Time Kernel
Real Time Kernel
Category: General LinuxCNC Questions
- phillc54

06 Jun 2024 00:00
- hmnijp
- hmnijp
05 Jun 2024 23:56
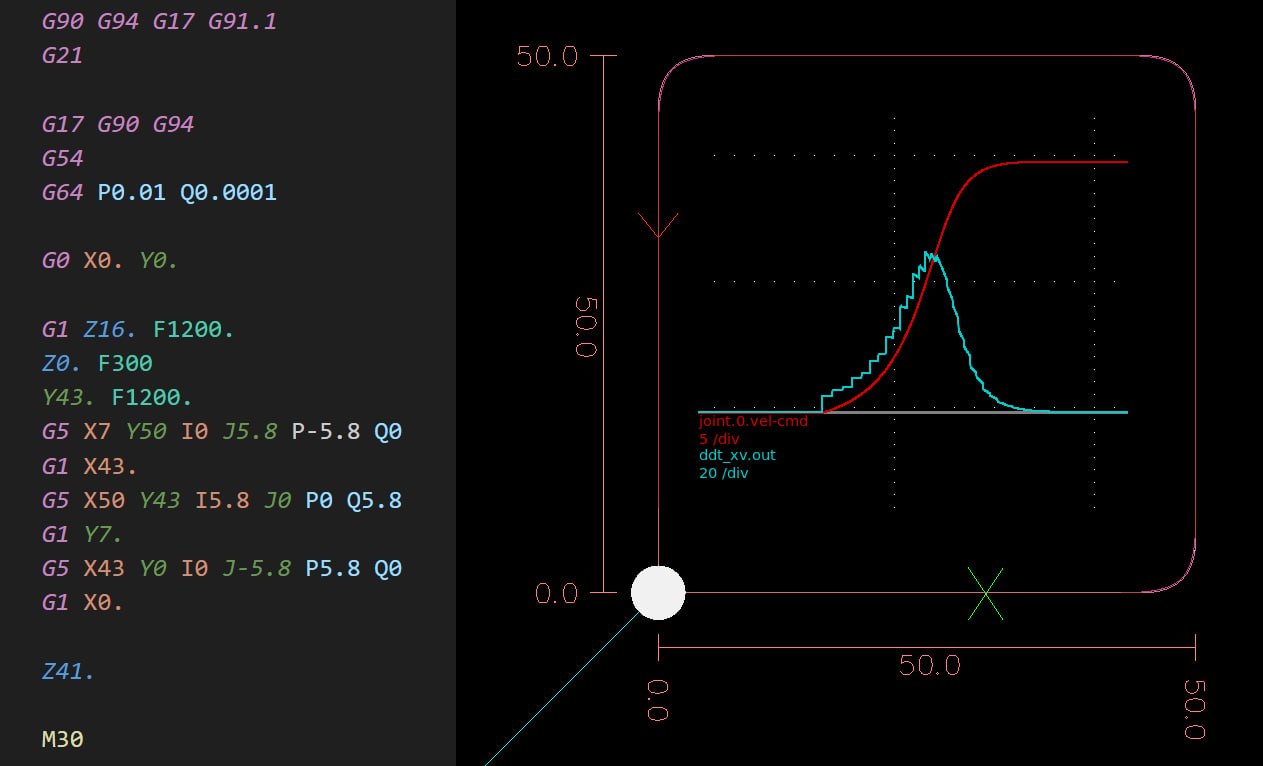
Replied by hmnijp on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- snowgoer540

05 Jun 2024 23:32 - 05 Jun 2024 23:39
Replied by snowgoer540 on topic Random Questions on setup
Random Questions on setup
Category: Plasmac

- andrew2085
- andrew2085
05 Jun 2024 22:06
Replied by andrew2085 on topic Real Time Kernel
Real Time Kernel
Category: General LinuxCNC Questions
- snowgoer540
05 Jun 2024 22:06 - 05 Jun 2024 22:09
Replied by snowgoer540 on topic Some inconveniences with using a touchscreen monitor
Some inconveniences with using a touchscreen monitor
Category: Plasmac
- eduard
05 Jun 2024 21:34
- dynodust
- dynodust
05 Jun 2024 21:14
- dynodust
- dynodust
05 Jun 2024 21:10
- zmrdko

05 Jun 2024 20:46
Replied by zmrdko on topic MS300 EtherCAT not going into OP state with CMM-02 (rev 131328)
MS300 EtherCAT not going into OP state with CMM-02 (rev 131328)
Category: EtherCAT
- royka
- royka
05 Jun 2024 20:44 - 05 Jun 2024 21:38
Replied by royka on topic Bad Latency Fujitsu Esprimo D756 i5 6500
Bad Latency Fujitsu Esprimo D756 i5 6500
Category: Computers and Hardware
- tommylight
05 Jun 2024 20:36
Replied by tommylight on topic Bad Latency Fujitsu Esprimo D756 i5 6500
Bad Latency Fujitsu Esprimo D756 i5 6500
Category: Computers and Hardware
- andrew2085
- andrew2085
05 Jun 2024 20:30
Replied by andrew2085 on topic Real Time Kernel
Real Time Kernel
Category: General LinuxCNC Questions
Time to create page: 0.624 seconds