Search Results (Searched for: )
- Aciera

13 Oct 2024 06:19
Replied by Aciera on topic Machine warning lights (Red, Amber, Green)
Machine warning lights (Red, Amber, Green)
Category: HAL
- Aciera
13 Oct 2024 06:05
Replied by Aciera on topic Fehler: LinuxCNC Jog_CONT Mode is TELEOP, cannot jog joint
Fehler: LinuxCNC Jog_CONT Mode is TELEOP, cannot jog joint
Category: Deutsch
- Craigl
- Craigl
13 Oct 2024 05:53
- zmrdko

13 Oct 2024 05:49
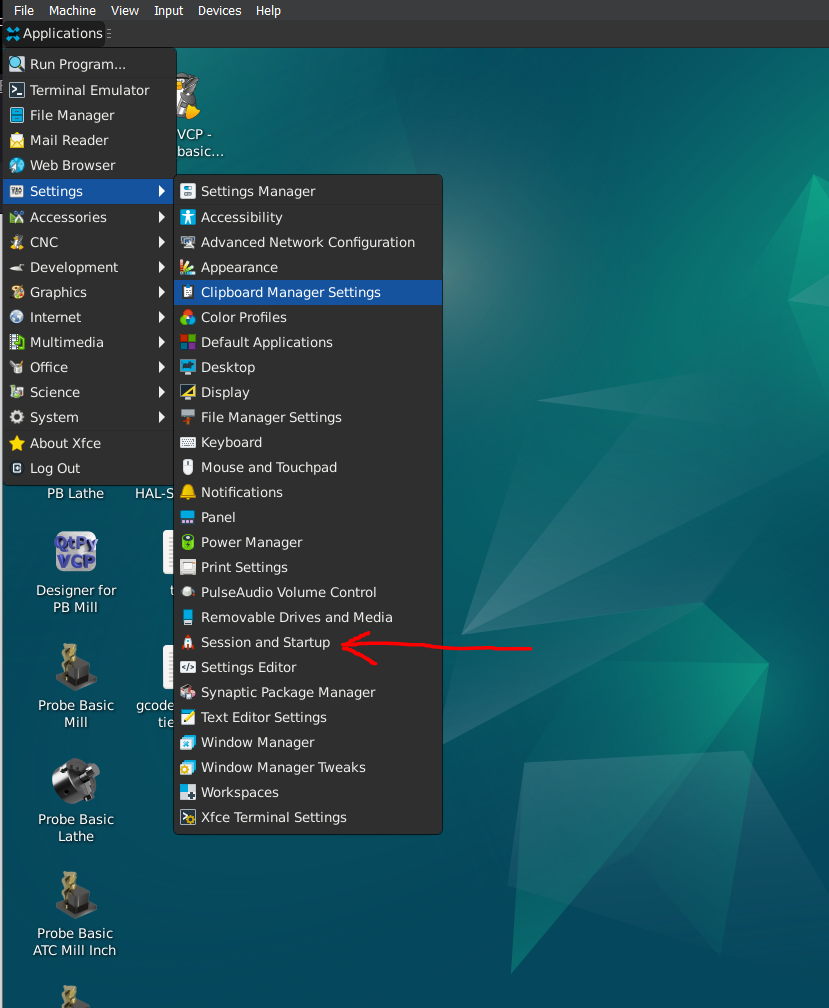
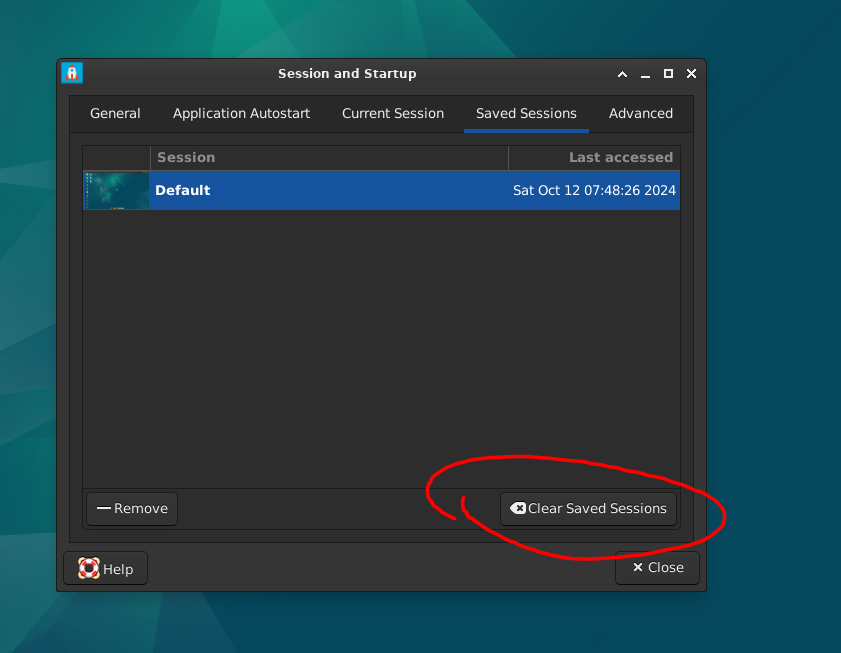
Replied by zmrdko on topic Blank screen deb12 after login
Blank screen deb12 after login
Category: General LinuxCNC Questions
- Aciera
13 Oct 2024 05:40
- Aciera
13 Oct 2024 05:39 - 13 Oct 2024 06:44
Replied by Aciera on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions
- Craigl
- Craigl
13 Oct 2024 05:37
- flyingbrick
- flyingbrick
13 Oct 2024 05:28
Replied by flyingbrick on topic 7i97T with Mesa CT- Desn't seem to be outputting an analogue signal.
7i97T with Mesa CT- Desn't seem to be outputting an analogue signal.
Category: Basic Configuration
- flyingbrick
- flyingbrick
13 Oct 2024 05:24 - 13 Oct 2024 05:34
Replied by flyingbrick on topic 7i97T with Mesa CT- Desn't seem to be outputting an analogue signal.
7i97T with Mesa CT- Desn't seem to be outputting an analogue signal.
Category: Basic Configuration
- flyingbrick
- flyingbrick
13 Oct 2024 05:21
Replied by flyingbrick on topic 7i97T with Mesa CT- Desn't seem to be outputting an analogue signal.
7i97T with Mesa CT- Desn't seem to be outputting an analogue signal.
Category: Basic Configuration
- PCW

13 Oct 2024 05:01
- cmorley
- cmorley
13 Oct 2024 04:43
Replied by cmorley on topic motion.adaptive-feed range problem
motion.adaptive-feed range problem
Category: Advanced Configuration
- spumco
- spumco
13 Oct 2024 04:43
- gardenweazel

13 Oct 2024 03:45
Replied by gardenweazel on topic What is gs2_vfd ?
What is gs2_vfd ?
Category: General LinuxCNC Questions
- spumco
- spumco
13 Oct 2024 03:17
Replied by spumco on topic 3D printed stuff, showcase it here
3D printed stuff, showcase it here
Category: Additive Manufacturing

Time to create page: 0.597 seconds