Search Results (Searched for: )
- Moutomation
- Moutomation
26 Aug 2024 11:33
Replied by Moutomation on topic Computer Shutdown
Computer Shutdown
Category: General LinuxCNC Questions
- Moutomation
- Moutomation
26 Aug 2024 10:58 - 26 Aug 2024 13:06
- rodw

26 Aug 2024 10:49
Replied by rodw on topic Amplifier Fault ECT60 Closed Loop
Amplifier Fault ECT60 Closed Loop
Category: EtherCAT
- mighty_mick

26 Aug 2024 10:47 - 26 Aug 2024 10:50
- royka
- royka
26 Aug 2024 10:18
Replied by royka on topic How to compile the RT kernel of a ARM board?
How to compile the RT kernel of a ARM board?
Category: Computers and Hardware
- Plasmanfm
- Plasmanfm
26 Aug 2024 10:07
- DPFlex
- DPFlex
26 Aug 2024 10:06
Replied by DPFlex on topic scarakins axis follow problem in -x and -y zone
scarakins axis follow problem in -x and -y zone
Category: Advanced Configuration
- seyad
- seyad
26 Aug 2024 09:40 - 26 Aug 2024 10:57
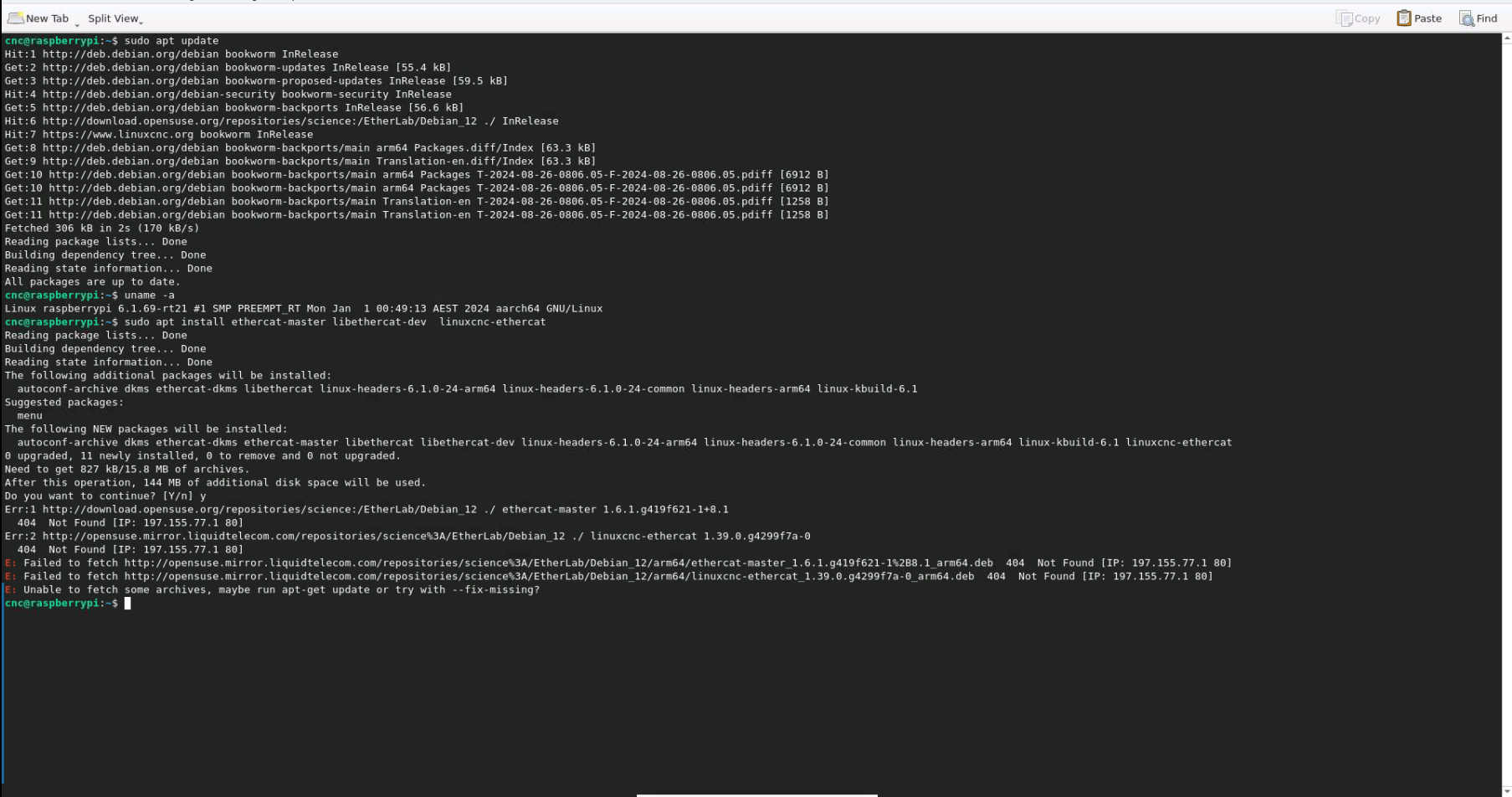
Replied by seyad on topic Ethercat installation from repositories - how to step by step
Ethercat installation from repositories - how to step by step
Category: EtherCAT
- Moutomation
- Moutomation
26 Aug 2024 09:17 - 26 Aug 2024 09:27
- TheRoslyak

26 Aug 2024 08:22
Replied by TheRoslyak on topic Amplifier Fault ECT60 Closed Loop
Amplifier Fault ECT60 Closed Loop
Category: EtherCAT
- anfänger
26 Aug 2024 08:17
- TheRoslyak
26 Aug 2024 08:12
Replied by TheRoslyak on topic Amplifier Fault ECT60 Closed Loop
Amplifier Fault ECT60 Closed Loop
Category: EtherCAT
- avive
- avive
26 Aug 2024 08:09
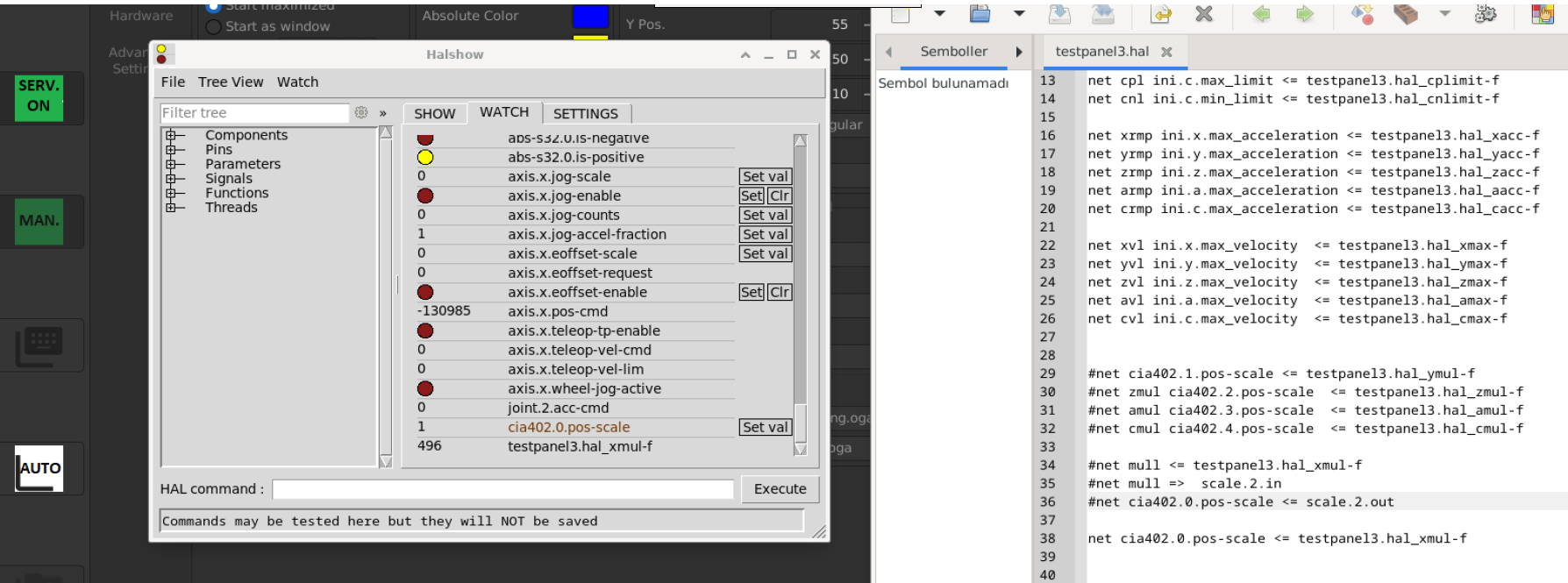
Replied by avive on topic Problems with Lichuan Ethercat servo drive
Problems with Lichuan Ethercat servo drive
Category: EtherCAT
- panming
- panming
26 Aug 2024 07:51
Replied by panming on topic How to compile the RT kernel of a ARM board?
How to compile the RT kernel of a ARM board?
Category: Computers and Hardware
- phillc54

26 Aug 2024 07:46
Replied by phillc54 on topic #<holes> = 3 - Unexpected behaviour
#<holes> = 3 - Unexpected behaviour
Category: Plasmac
Time to create page: 0.759 seconds