Search Results (Searched for: )
- Rune_cnc
- Rune_cnc
29 Apr 2025 12:10
Using npn Inductive sensor for end stop. was created by Rune_cnc
Using npn Inductive sensor for end stop.
Category: Basic Configuration
- pgf
- pgf
29 Apr 2025 11:57
"From scraps were ye made, and scraps ye shall be!" was created by pgf
"From scraps were ye made, and scraps ye shall be!"
Category: Show Your Stuff



")
- Spyderbreath

29 Apr 2025 11:03
Replied by Spyderbreath on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- Muftijaja
- Muftijaja
29 Apr 2025 11:02 - 29 Apr 2025 12:11
Replied by Muftijaja on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
motor-0-position error beim Abbremsen aus 4-7,5 m/min
Category: Deutsch
- Muftijaja
- Muftijaja
29 Apr 2025 10:40 - 29 Apr 2025 10:42
Replied by Muftijaja on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
motor-0-position error beim Abbremsen aus 4-7,5 m/min
Category: Deutsch
- zmrdko

29 Apr 2025 10:24
Replied by zmrdko on topic LinuxCNC S-Curve Accelerations
LinuxCNC S-Curve Accelerations
Category: General LinuxCNC Questions
- DarkPhoinix
- DarkPhoinix
29 Apr 2025 10:23
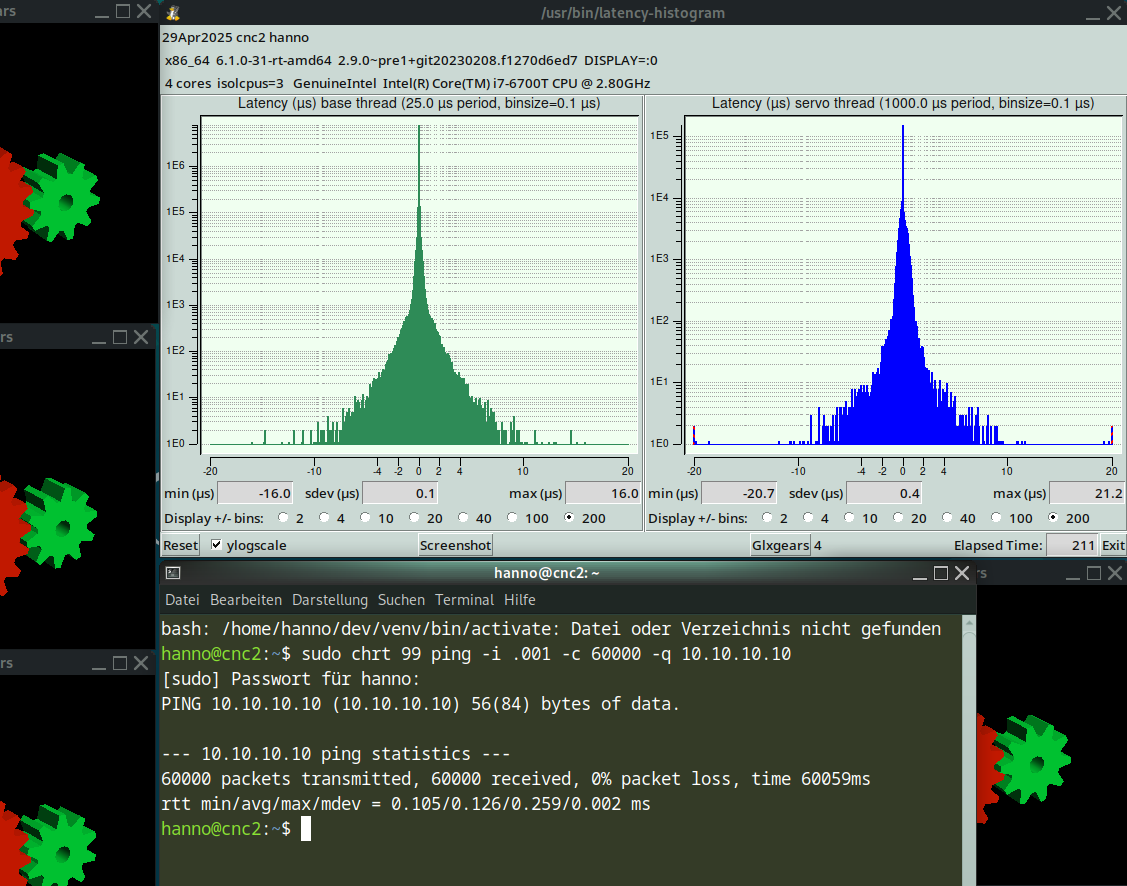
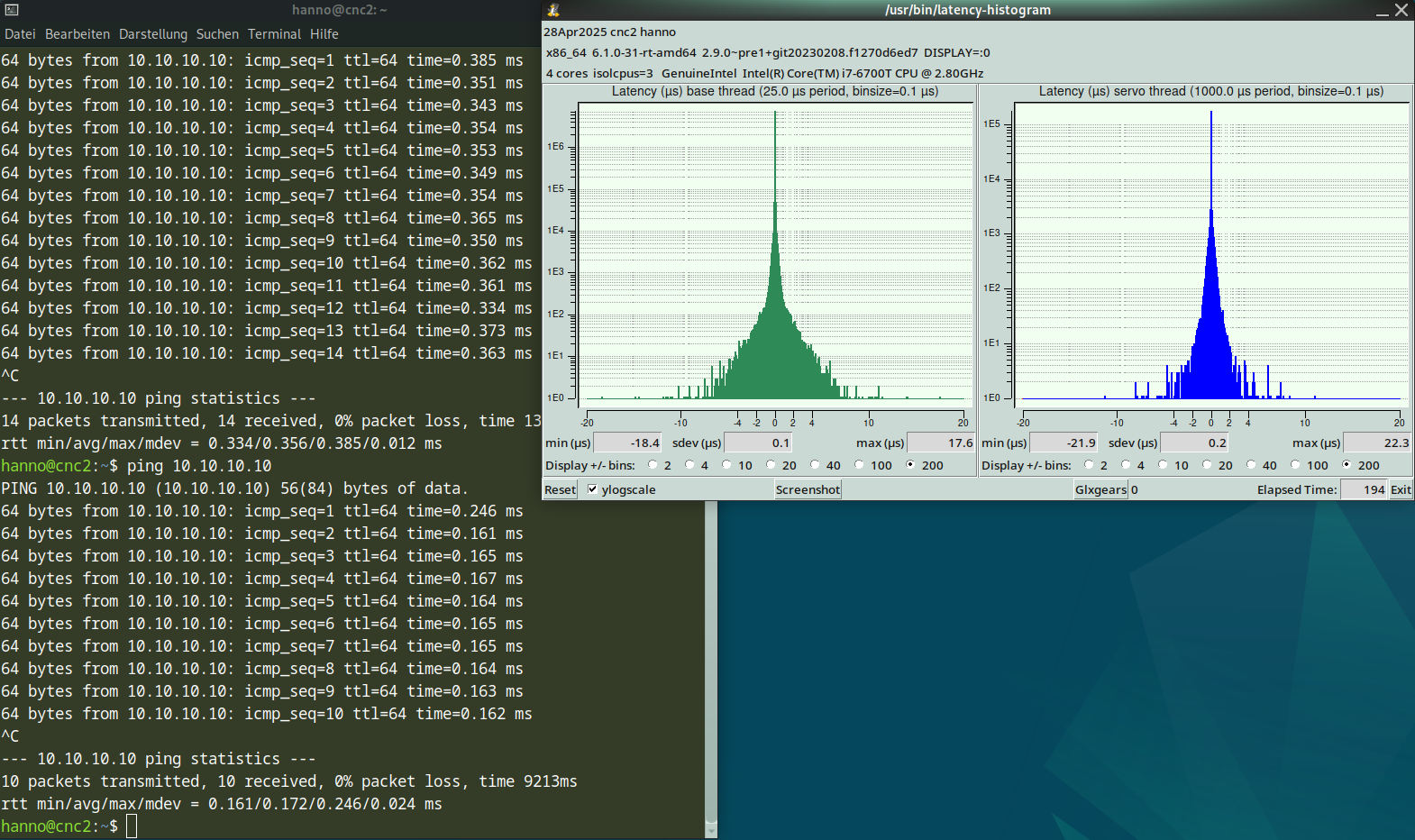
Replied by DarkPhoinix on topic [SOLVED]linuxcnc Latency test ambiguous results
[SOLVED]linuxcnc Latency test ambiguous results
Category: General LinuxCNC Questions
- emresensoy
- emresensoy
29 Apr 2025 09:22
Replied by emresensoy on topic QtPyVCP designer plugin fails
QtPyVCP designer plugin fails
Category: QtPyVCP
- Surmetall

29 Apr 2025 09:19
Replied by Surmetall on topic WEMAS MT 32 CNC Lathe -> LinuxCNC - Mesa or EtherCAT?
WEMAS MT 32 CNC Lathe -> LinuxCNC - Mesa or EtherCAT?
Category: Turning
- rodw

29 Apr 2025 09:11
Replied by rodw on topic Tandem Y Axis in stepconf assistance.
Tandem Y Axis in stepconf assistance.
Category: StepConf Wizard
- stenly
- stenly
29 Apr 2025 09:09
Replied by stenly on topic Implementing Spindle Homing for DELTA C2000 Plus (In)correctly?
Implementing Spindle Homing for DELTA C2000 Plus (In)correctly?
Category: EtherCAT
- Neiji_msk
- Neiji_msk
29 Apr 2025 08:36
Replied by Neiji_msk on topic EtherCAT and selfmade driver
EtherCAT and selfmade driver
Category: EtherCAT
- Hakan
- Hakan
29 Apr 2025 08:34
Replied by Hakan on topic First time to try build my xml for not listed ethercat in-out component
First time to try build my xml for not listed ethercat in-out component
Category: EtherCAT

- dannym
- dannym
29 Apr 2025 08:15
Replied by dannym on topic Z axis is being controlled by A
Z axis is being controlled by A
Category: Basic Configuration
- Hakan
- Hakan
29 Apr 2025 07:47
Replied by Hakan on topic General Questions about using ethercat
General Questions about using ethercat
Category: EtherCAT
Time to create page: 0.392 seconds