Search Results (Searched for: )
- PCW

25 May 2024 20:55
- Marvin_Maverick

25 May 2024 20:36 - 25 May 2024 20:42
Replied by Marvin_Maverick on topic LinuxCNC on Raspberry Pi 5 CPU 3 not running
LinuxCNC on Raspberry Pi 5 CPU 3 not running
Category: Installing LinuxCNC
- Grotius

25 May 2024 20:08 - 25 May 2024 20:52
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions

- Grotius
25 May 2024 19:34
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions

- woai312742
- woai312742
25 May 2024 19:10
Replied by woai312742 on topic Kinematic model for a 5axis mill with universal (nutating) head
Kinematic model for a 5axis mill with universal (nutating) head
Category: Show Your Stuff
- Thayloreing
- Thayloreing
25 May 2024 19:07
Replied by Thayloreing on topic Error during install RTAI Kernel on Debian 12
Error during install RTAI Kernel on Debian 12
Category: Installing LinuxCNC
- RyanB

25 May 2024 19:06
Replied by RyanB on topic Trouble Shooting USB Jogging with an Xbox Controller
Trouble Shooting USB Jogging with an Xbox Controller
Category: General LinuxCNC Questions
- Thayloreing
- Thayloreing
25 May 2024 19:02
Replied by Thayloreing on topic Error during install RTAI Kernel on Debian 12
Error during install RTAI Kernel on Debian 12
Category: Installing LinuxCNC
- andypugh

25 May 2024 18:52
Replied by andypugh on topic Joypad Reverse Jog Direction
Joypad Reverse Jog Direction
Category: HAL
- Lcvette

25 May 2024 18:51
Replied by Lcvette on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- andypugh
25 May 2024 18:48
Replied by andypugh on topic Error during install RTAI Kernel on Debian 12
Error during install RTAI Kernel on Debian 12
Category: Installing LinuxCNC
- zmrdko

25 May 2024 18:38 - 25 May 2024 18:42
Replied by zmrdko on topic Mesa 7i95T PID tuning for velocity mode
Mesa 7i95T PID tuning for velocity mode
Category: Advanced Configuration
- Thayloreing
- Thayloreing
25 May 2024 18:36
Replied by Thayloreing on topic Error during install RTAI Kernel on Debian 12
Error during install RTAI Kernel on Debian 12
Category: Installing LinuxCNC
- Project_Hopeless

25 May 2024 18:22
Joypad Reverse Jog Direction was created by Project_Hopeless
Joypad Reverse Jog Direction
Category: HAL
- Aciera

25 May 2024 18:21
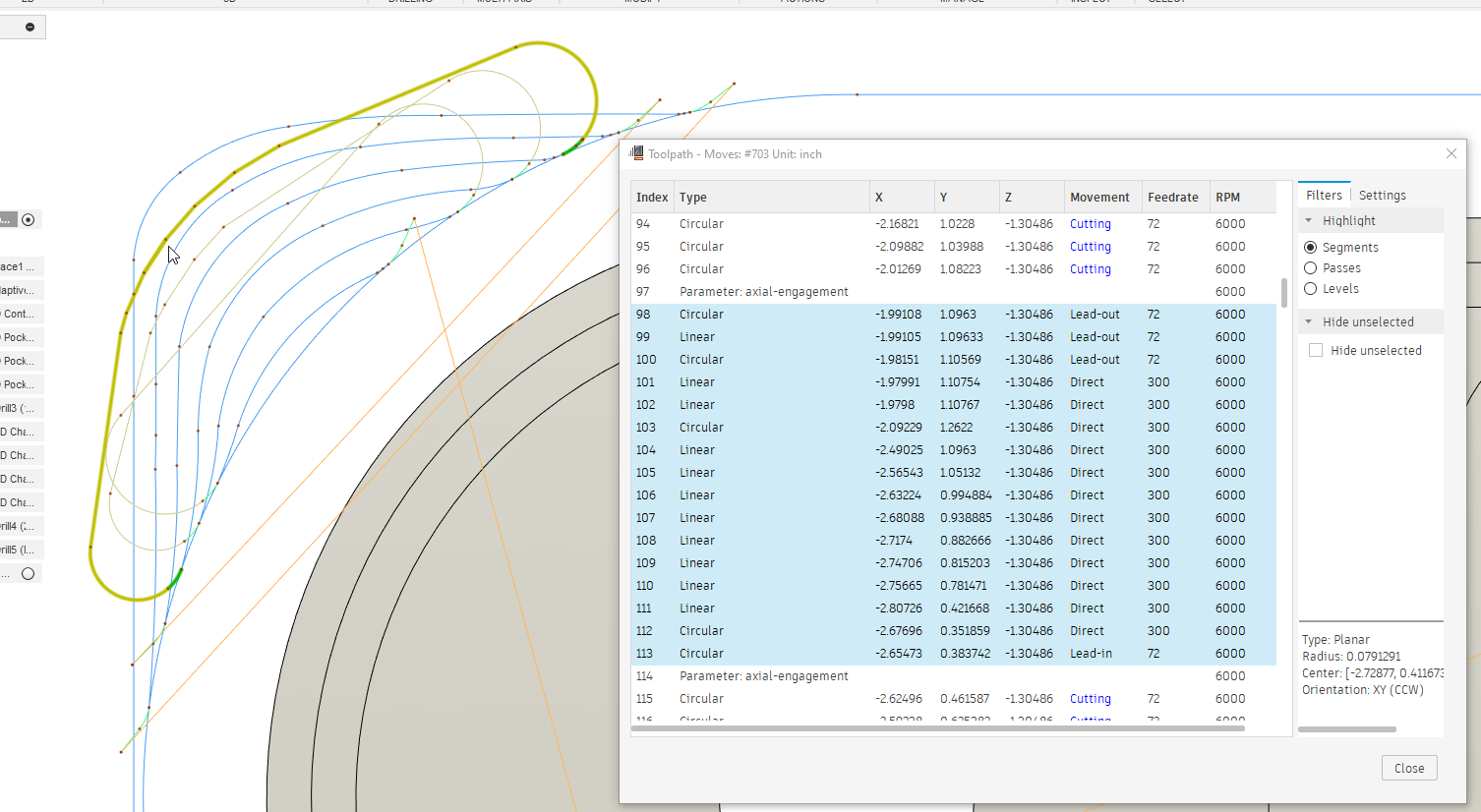
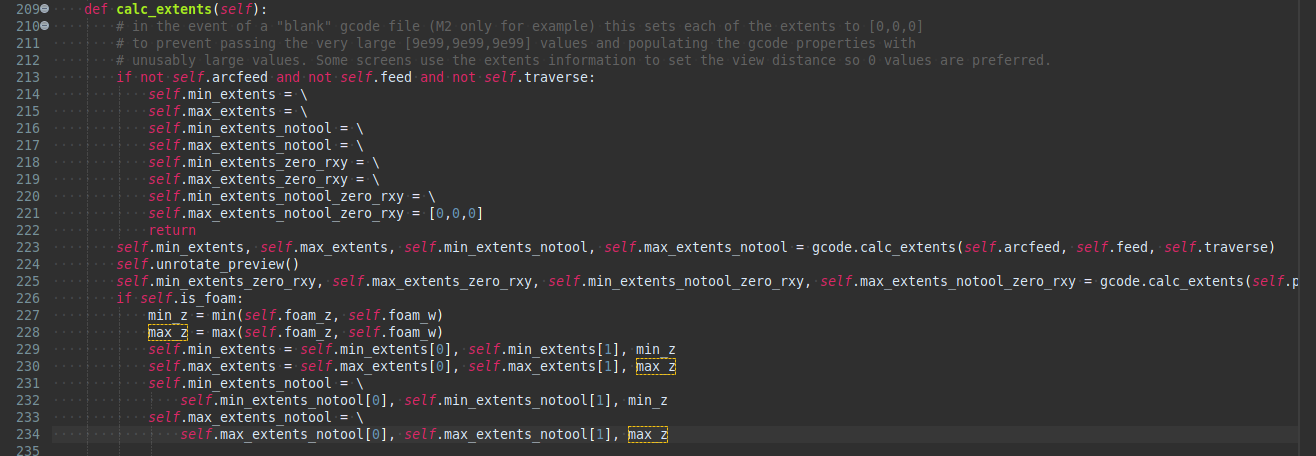
Replied by Aciera on topic Python gcode.parse and gcode.calc_extents
Python gcode.parse and gcode.calc_extents
Category: Other User Interfaces

Time to create page: 0.654 seconds