Search Results (Searched for: )
- papagno-source
- papagno-source
12 Apr 2026 12:41 - 12 Apr 2026 14:07
Replied by papagno-source on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
xml debian 10
<masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="-1">
<slave idx="0" type="generic" vid="0000022b" pid="0531ec01" configPdos="true">
<sdoConfig idx="3103" subIdx="08">
<sdoDataRaw data="16"/>
</sdoConfig>
<sdoConfig idx="3104" subIdx="08">
<sdoDataRaw data="16"/>
</sdoConfig>
<sdoConfig idx="3103" subIdx="09">
<sdoDataRaw data="03"/>
</sdoConfig>
<sdoConfig idx="3104" subIdx="09">
<sdoDataRaw data="01"/>
</sdoConfig>
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="7001" subIdx="01" bitLen="8" halPin="out_veloci" halType="bit"/>
<pdoEntry idx="7002" subIdx="01" bitLen="16" halPin="ao0" halType="float" scale="2765"/>
<pdoEntry idx="7002" subIdx="02" bitLen="16" halPin="ao1" halType="float" scale="2765"/>
<pdoEntry idx="7003" subIdx="01" bitLen="32" halPin="comparation_value" halType="float" scale="1"/>
<pdoEntry idx="7003" subIdx="02" bitLen="32" halPin="setvalue" halType="float" scale="1"/>
<pdoEntry idx="7003" subIdx="03" bitLen="16" halPin="control_word" halType="bit"/>
<pdoEntry idx="7004" subIdx="01" bitLen="32" halPin="comparation_valuev" halType="float" scale="1"/>
<pdoEntry idx="7004" subIdx="02" bitLen="32" halPin="setvaluev" halType="float" scale="1"/>
<pdoEntry idx="7004" subIdx="03" bitLen="16" halPin="control_wordv" halType="bit"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6000" subIdx="01" bitLen="8" halPin="in_veloci" halType="bit"/>
<pdoEntry idx="6003" subIdx="01" bitLen="32" halPin="counter_value" halType="float" scale="1"/>
<pdoEntry idx="6003" subIdx="02" bitLen="16" halPin="counter_status" halType="bit"/>
<pdoEntry idx="6003" subIdx="03" bitLen="16" halPin="microsecond" halType="S32"/>
<pdoEntry idx="6004" subIdx="01" bitLen="32" halPin="counter_valuev" halType="float" scale="1"/>
<pdoEntry idx="6004" subIdx="02" bitLen="16" halPin="counter_statusv" halType="bit"/>
<pdoEntry idx="6004" subIdx="03" bitLen="16" halPin="microsecondv" halType="S32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE X -->
<slave idx="1" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000078125 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE Y -->
<slave idx="2" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE Z -->
<slave idx="3" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI SP -->
<slave idx="4" type="generic" vid="01dd" pid="10400140" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6042" subIdx="00" bitLen="16" halPin="cmdvel" halType="float"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE A -->
<slave idx="5" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE B -->
<slave idx="6" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE C -->
<slave idx="7" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
</master>
</masters>
Warning: Spoiler!
<masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="-1">
<slave idx="0" type="generic" vid="0000022b" pid="0531ec01" configPdos="true">
<sdoConfig idx="3103" subIdx="08">
<sdoDataRaw data="16"/>
</sdoConfig>
<sdoConfig idx="3104" subIdx="08">
<sdoDataRaw data="16"/>
</sdoConfig>
<sdoConfig idx="3103" subIdx="09">
<sdoDataRaw data="03"/>
</sdoConfig>
<sdoConfig idx="3104" subIdx="09">
<sdoDataRaw data="01"/>
</sdoConfig>
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="7001" subIdx="01" bitLen="8" halPin="out_veloci" halType="bit"/>
<pdoEntry idx="7002" subIdx="01" bitLen="16" halPin="ao0" halType="float" scale="2765"/>
<pdoEntry idx="7002" subIdx="02" bitLen="16" halPin="ao1" halType="float" scale="2765"/>
<pdoEntry idx="7003" subIdx="01" bitLen="32" halPin="comparation_value" halType="float" scale="1"/>
<pdoEntry idx="7003" subIdx="02" bitLen="32" halPin="setvalue" halType="float" scale="1"/>
<pdoEntry idx="7003" subIdx="03" bitLen="16" halPin="control_word" halType="bit"/>
<pdoEntry idx="7004" subIdx="01" bitLen="32" halPin="comparation_valuev" halType="float" scale="1"/>
<pdoEntry idx="7004" subIdx="02" bitLen="32" halPin="setvaluev" halType="float" scale="1"/>
<pdoEntry idx="7004" subIdx="03" bitLen="16" halPin="control_wordv" halType="bit"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6000" subIdx="01" bitLen="8" halPin="in_veloci" halType="bit"/>
<pdoEntry idx="6003" subIdx="01" bitLen="32" halPin="counter_value" halType="float" scale="1"/>
<pdoEntry idx="6003" subIdx="02" bitLen="16" halPin="counter_status" halType="bit"/>
<pdoEntry idx="6003" subIdx="03" bitLen="16" halPin="microsecond" halType="S32"/>
<pdoEntry idx="6004" subIdx="01" bitLen="32" halPin="counter_valuev" halType="float" scale="1"/>
<pdoEntry idx="6004" subIdx="02" bitLen="16" halPin="counter_statusv" halType="bit"/>
<pdoEntry idx="6004" subIdx="03" bitLen="16" halPin="microsecondv" halType="S32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE X -->
<slave idx="1" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000078125 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE Y -->
<slave idx="2" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE Z -->
<slave idx="3" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI SP -->
<slave idx="4" type="generic" vid="01dd" pid="10400140" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6042" subIdx="00" bitLen="16" halPin="cmdvel" halType="float"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE A -->
<slave idx="5" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE B -->
<slave idx="6" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
<!-- INIZIO PARAMETRI ASSE C -->
<slave idx="7" type="generic" vid="850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"></syncManager>
<syncManager idx="1" dir="in"></syncManager>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="drivecontrol" halType="bit"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="u32"/>
<!--PARAMETRO POSCOMAND IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="838860.7"/>
<pdoEntry idx="6098" subIdx="00" bitLen="8" halPin="homemode" halType="u32"/>
<!--PARAMETRO HOMESPPED1 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="01" bitLen="32" halPin="homespeed1" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMESPPED2 IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="6099" subIdx="02" bitLen="32" halPin="homespeed2" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEACC IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="609A" subIdx="00" bitLen="32" halPin="homeacc" halType="float" scale="838860.7"/>
<!--PARAMETRO HOMEOFFSET IN SCALE SCRIVERE 8388607/X DOVE X SONO MM A GIRO MOTORE ESEMP: 8388607/10MM = 838860.7 -->
<pdoEntry idx="607C" subIdx="00" bitLen="32" halPin="homeoffset" halType="float" scale="838860.7"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="drivestatus" halType="bit"/>
<pdoEntry idx="6063" subIdx="00" bitLen="32" halPin="enccounts" halType="s32"/>
<!--PARAMETRO POS IN SCALE SCRIVERE X/8388607 DOVE X SONO MM A GIRO MOTORE ESEMP: 10/8388607/= 0.0000011920930376 -->
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="pos" halType="float" scale="0.0000011920930376"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="torque%" halType="float" scale="0.1"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="velmotore" halType="float" scale="0.00007"/>
<pdoEntry idx="603F" subIdx="00" bitLen="16" halPin="allarm" halType="u32"/>
</pdo>
</syncManager>
<dcConf assignActivate = "300" sync0Cycle = "*1" sync0Shift = "0" />
<watchdog divider="2498" intervals="1000"/>
</slave>
</master>
</masters>
- papagno-source
- papagno-source
12 Apr 2026 12:38 - 12 Apr 2026 12:38
Replied by papagno-source on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
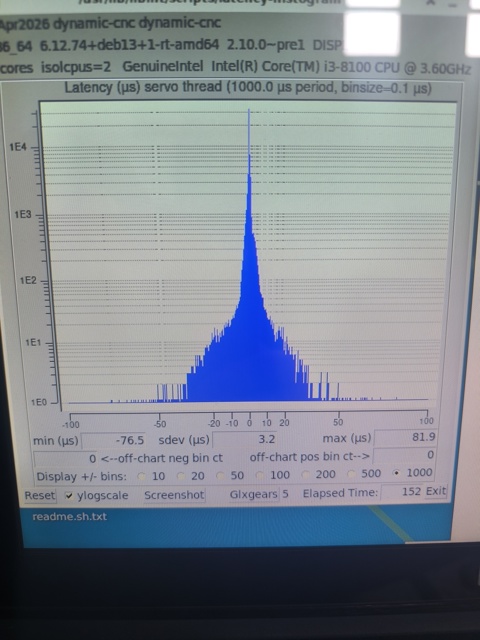
Good morning everyone. We're running some tests with Rodw on a Debian Trixie system, kernel 6.12.74-rt, and ethercat 1.6.9.
Just to be fair, we're using the same configuration on real machines, so motors connected to lead screws, running Debian 10, kernel 4.19.0-27-rt, ethercat 1.5.2, and linuxcnc 2.9.0-pre1. So, with Debian 10, the machines work without problems. When I first start up, the drives and all ethercat I/O are immediately visible, meaning, for example, the positions of the absolute encoders for the motors appear instantly upon startup.
With Debian Trixie, we're having two problems. A less serious one, that is, at startup, the motor encoders' values appear late, the first drive starting to appear after about a second (x axis), after another second Y appears and after that Z appears. But the most serious problem is that if you run the machine, the axes shake, then they stop shaking, then the vibration comes back and everything gets worse if I move windows on the desktop. Rodw has already attached the latency test on the matter, but I repeat, the PC is always the same and all the i/o and xml files are the same. Now I tried to copy from Debian 10 the bin/lcec_conf and rtlib/lcec.so files into the respective directories of Debian Trixie, without result, same problem. We tried to copy the same files from a version with the Grandixxximo patch, same problem, I also tried to vary the lcec.0.pll-drift pin, with values from 10 to 1000 without solving. Honestly, I don't I know what to do. I'm attaching the XML files I use on Debian 10 and Trixie.
Just to be fair, we're using the same configuration on real machines, so motors connected to lead screws, running Debian 10, kernel 4.19.0-27-rt, ethercat 1.5.2, and linuxcnc 2.9.0-pre1. So, with Debian 10, the machines work without problems. When I first start up, the drives and all ethercat I/O are immediately visible, meaning, for example, the positions of the absolute encoders for the motors appear instantly upon startup.
With Debian Trixie, we're having two problems. A less serious one, that is, at startup, the motor encoders' values appear late, the first drive starting to appear after about a second (x axis), after another second Y appears and after that Z appears. But the most serious problem is that if you run the machine, the axes shake, then they stop shaking, then the vibration comes back and everything gets worse if I move windows on the desktop. Rodw has already attached the latency test on the matter, but I repeat, the PC is always the same and all the i/o and xml files are the same. Now I tried to copy from Debian 10 the bin/lcec_conf and rtlib/lcec.so files into the respective directories of Debian Trixie, without result, same problem. We tried to copy the same files from a version with the Grandixxximo patch, same problem, I also tried to vary the lcec.0.pll-drift pin, with values from 10 to 1000 without solving. Honestly, I don't I know what to do. I'm attaching the XML files I use on Debian 10 and Trixie.
- RotarySMP

12 Apr 2026 11:56 - 12 Apr 2026 11:58
Replied by RotarySMP on topic Schaublin 125-CNC retrofit.
Schaublin 125-CNC retrofit.
Category: Turning
Thanks.
Good point. I didn't consider helix angle. I tried with G76 P1.27 J0.4 R1.8 Q30 but the tip chipped out after a few passes. I then went down in J over a few attempts, with 0.2 resulting in a lot of passes, and the tip wearing out rather than chipping. I ended up with R2 and J0.3. I'd put in a fresh tip and rerun the code to clean up the thread, and use that same tip to rough out the next part.
They are crap Amazon inserts, so maybe as carbide prices went up, they mixed some sawdust into the mixture")
I was was unsure how much overhang to give those jaws. I really need to make up some new ones, as all the only I have are heavily used.
Yeah, I only cut in both directions, as it gave me the nice chamfer on the step.
Good point. I didn't consider helix angle. I tried with G76 P1.27 J0.4 R1.8 Q30 but the tip chipped out after a few passes. I then went down in J over a few attempts, with 0.2 resulting in a lot of passes, and the tip wearing out rather than chipping. I ended up with R2 and J0.3. I'd put in a fresh tip and rerun the code to clean up the thread, and use that same tip to rough out the next part.
They are crap Amazon inserts, so maybe as carbide prices went up, they mixed some sawdust into the mixture
I was was unsure how much overhang to give those jaws. I really need to make up some new ones, as all the only I have are heavily used.
Yeah, I only cut in both directions, as it gave me the nice chamfer on the step.
- spumco
- spumco
12 Apr 2026 11:40
Replied by spumco on topic Schaublin 125-CNC retrofit.
Schaublin 125-CNC retrofit.
Category: Turning
Thanks for the vid Mark!
Couple of unsolicited thoughts...
Couple of unsolicited thoughts...
- I wonder if part of your threading inserts were dying because they're designed for RH helix instead of LH? Probably not, but I have to wonder.
- I also saw what looked like a million threading passes. Perhaps your aren't taking a deep enough cut per pass and rubbing?
- Looks like your pneumatic chuck has adjustable serrated top jaws. Instead of turning a new step diameter so far out that you run in to the holes, maybe move the top jaws out a couple of serrations? My Rohm is similar and has a specification on how many serrations you can overhang before they get dodgy.
- Birds-nesting during facing... just cut from OD to ID instead of both directions. That inner step was so shallow you should be able to just plunge in Z- and cut to the ID.
- leandrocontarini
- leandrocontarini
12 Apr 2026 11:15 - 12 Apr 2026 11:16
Replied by leandrocontarini on topic Chinese Mesa 7I92 from aliexpress NEW
Chinese Mesa 7I92 from aliexpress NEW
Category: Driver Boards
Recuperei a minha dessa forma.
Com o cabo jtag.
Instalei um .bit errada e a placa travou , depois o vendedor forneceu o .bit correto e usei o jtag para recuperar a placa.
Estou com 3 modelos de placas aqui, todas funcionam muito bem.
Com o cabo jtag.
Instalei um .bit errada e a placa travou , depois o vendedor forneceu o .bit correto e usei o jtag para recuperar a placa.
Estou com 3 modelos de placas aqui, todas funcionam muito bem.
- DerKlotz
- DerKlotz
12 Apr 2026 10:20
Replied by DerKlotz on topic When I implement a handwheel, the milling motor stops spinning
When I implement a handwheel, the milling motor stops spinning
Category: Advanced Configuration
I changed the lines as follows
net program.is-idle whb.halui.program.is-idle
net program.is-paused whb.halui.program.is-paused
net program.is-idle not.0.in <= halui.program.is-idle
net program.is-paused halui.program.is-paused => time.0.pause
No errors at startup but is it right???
net program.is-idle whb.halui.program.is-idle
net program.is-paused whb.halui.program.is-paused
net program.is-idle not.0.in <= halui.program.is-idle
net program.is-paused halui.program.is-paused => time.0.pause
No errors at startup but is it right???
- RotarySMP
12 Apr 2026 10:07 - 12 Apr 2026 10:09
Replied by RotarySMP on topic Schaublin 125-CNC retrofit.
Schaublin 125-CNC retrofit.
Category: Turning
Thanks a lot for your help and advice guys. I got the turret.comp finished and working really nicely. (Attached)
Here is a video of it in action, doing it's first production run...
Cheers,
Mark
Here is a video of it in action, doing it's first production run...
Cheers,
Mark
- rodw

12 Apr 2026 09:49
Replied by rodw on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
Thanks for ideas.
It gets worse and I've been pondering the next step.: "The machine is unusable; the axes shake and make a lot of noise. I tried rebooting and changing the refclock settings from -1 to values of 1 or 1000, but to no avail. The PC has an Intel NIC, but, as I said, the hardware and software are identical to Debian 10. At this point, I don't know what to do. The problem is EtherCAT."
The customer would like to try Ethercat 1.52 from his Debian 10 days but I don't think it will run on later kernels
The current Debian 10 Ethercat version on their repos is 1.62, Debian 12 and Debian 13 is 1.69 with no other earlier versions published. Latency is OK but not great for a 4 core machine
The only thing I can think of is to roll back to Debian 12. Any other ideas?
It gets worse and I've been pondering the next step.: "The machine is unusable; the axes shake and make a lot of noise. I tried rebooting and changing the refclock settings from -1 to values of 1 or 1000, but to no avail. The PC has an Intel NIC, but, as I said, the hardware and software are identical to Debian 10. At this point, I don't know what to do. The problem is EtherCAT."
The customer would like to try Ethercat 1.52 from his Debian 10 days but I don't think it will run on later kernels
The current Debian 10 Ethercat version on their repos is 1.62, Debian 12 and Debian 13 is 1.69 with no other earlier versions published. Latency is OK but not great for a 4 core machine
The only thing I can think of is to roll back to Debian 12. Any other ideas?
- endian

12 Apr 2026 08:52
but it is sometimes odd till todays that with some hardware at bus ethercat is self-restarting and with some hardware is not ... and therefore bus has no slave active
Ive not found solution at this till now...
Replied by endian on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
Ive experience of this non recognizing slaves on the bus during some experimenting at my debian 12 + 6.xx kernel ... but everything was solved by using non generic drivers and restarting ethercat service ifself... back that time I have benn using the 1.5.2 ethercat ...Thought I'd ask here. User has upgraded from Debian 10 to latest Debian 13.3 and 2.10pre RIP config. Now Running grandixximos Ethercat driver but have not set syncToRefClock yet.
He reports:
With the same xml file, i/o and drive configuration, Debian 10 kernel 4.19 with ethercat 1.5.2 works fine, it has no latency at boot and hasn't given any problems. The current system has kernel 6.12 with ethercat 1.6.9 and has synchronization problems at boot, sometimes it doesn't see some drives on the bus, I'm forced to turn it off and on again. Would it be possible to use the current 6.12 kernel and linuxcnc 2.10, with ethercat 1.5.2?
I copied the lcec_conf and lcec.so files into the respective bin and rtailib folders from the Debian 10 version that I have and which works well on my machines, with linuxcnc 2.9.0 pre1 and etherrcat 1.5.2. At boot time, the drives are now seen within 1-2 seconds of booting and are always found on the bus.
This has 5 axis servos and a few Beckhoff modules attached to EK1100
Next step is to add syncToRefClock
It seems odd to me that today's Ethercat hal driver is not performing but rolling back to an older version of it works. It seems to me his problem is the driver, not the version of Ethercat.
Any ideas or advice?
but it is sometimes odd till todays that with some hardware at bus ethercat is self-restarting and with some hardware is not ... and therefore bus has no slave active
Ive not found solution at this till now...
- Hakan
- Hakan
12 Apr 2026 07:12 - 12 Apr 2026 07:13
Replied by Hakan on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
It would be helpful to see the messages in syslog from when there was a problem.
from 5 April as an example. And cut to a reasonable length.
journalctl --since=2026-4-5 | grep EtherCAT from 5 April as an example. And cut to a reasonable length.
- rob123
- rob123
12 Apr 2026 06:45
Replied by rob123 on topic Error unable to launch after pncconf.
Error unable to launch after pncconf.
Category: PnCConf Wizard
Hello PCW, I am having the same trouble.
Do you have or know where I can get a copy of 5i25_prob_rfx2.bit that includes a DPLL?
Thanks Robert?
Do you have or know where I can get a copy of 5i25_prob_rfx2.bit that includes a DPLL?
Thanks Robert?
- leexi
- leexi
12 Apr 2026 06:22 - 13 Apr 2026 19:15
Replied by leexi on topic probe basic lath to define a net spindle-index-en spindle.0.index-enable
probe basic lath to define a net spindle-index-en spindle.0.index-enable
Category: HAL
Dear
I think there are some opportunities in absolute encoders field with low information output as the one that I have.
with only encoder counts in a multi-turn format s32 and encoder spins counter as well as multi-turn format s32.
I make it works but I need to spend some time testing it. but G33 and G76 are working with ethercat absolute encoder as spindle speed and position feedback , and some spontaneous axis following error to debug. ( jitter ? i do not know ).
Thank you.
I think there are some opportunities in absolute encoders field with low information output as the one that I have.
with only encoder counts in a multi-turn format s32 and encoder spins counter as well as multi-turn format s32.
I make it works but I need to spend some time testing it. but G33 and G76 are working with ethercat absolute encoder as spindle speed and position feedback , and some spontaneous axis following error to debug. ( jitter ? i do not know ).
Thank you.
- grandixximo

12 Apr 2026 05:35 - 12 Apr 2026 05:36
Replied by grandixximo on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
Yes sorry, because your post was a bit all over the place.
about ethercat master, 1.6.9 is pretty new, so I was asking to double check with 1.6.8
But I agree linuxcnc-ethercat seems to be the issue, so I was asking about the code for lcec aka linuxcnc-ethercat
You moved the lcec_conf and lcec.so
But do you have the code for the linuxcnc-ethercat that works? or can you at least share approximately where this working version could have come from? Without that, it is really hard to understand what is happening, and get to the bottom of it.
about ethercat master, 1.6.9 is pretty new, so I was asking to double check with 1.6.8
But I agree linuxcnc-ethercat seems to be the issue, so I was asking about the code for lcec aka linuxcnc-ethercat
You moved the lcec_conf and lcec.so
But do you have the code for the linuxcnc-ethercat that works? or can you at least share approximately where this working version could have come from? Without that, it is really hard to understand what is happening, and get to the bottom of it.
- rodw
12 Apr 2026 01:51
Replied by rodw on topic HAL component for tangential knife
HAL component for tangential knife
Category: HAL
Before this, I tried a component and attempted to read the current X & Y position and the prior x,y position. This allowed me to calculate the radius which I wanted but it never worked accurately. So I went to the state tags approach and Andy one of the devs convinced me to add the heading while I was at it.
- rodw
12 Apr 2026 01:46
Replied by rodw on topic HAL component for tangential knife
HAL component for tangential knife
Category: HAL
This is something that is missing in Linuxcnc. This is actually quite complex. I had a go at it some years ago but my use case faded away.
The pull request still persists. github.com/LinuxCNC/linuxcnc/pull/900
I got it working but it needed a bit of cleanup once the devs reviewed. It really needs to be completed.
This gets pretty deep into the Linuxcnc internals. The interpreter and motion are totally seperate entities in Linuxcnc. The interpreter tokenises the gcode so motion only sees the waypoints.
The interpreter knows or can calculate the centre of the G2/G3 arc and its radius. Motion does not. The change which enabled this was the release of state tags. State Tags passes the interpreter state to motion in real time.
github.com/LinuxCNC/linuxcnc/blob/master...c/motion/state_tag.h
I extended the tags to include
GM_FIELD_FLOAT_ARC_RADIUS,
GM_FIELD_FLOAT_ARC_CENTER_X,
GM_FIELD_FLOAT_ARC_CENTER_Y,
GM_FIELD_FLOAT_STRAIGHT_HEADING,
The last field is the heading you need for your knife.
I published all of these state tags as interp.* pins including the heading so interp.heading is exactly what you need!
I was thinking recently now I am retired I should revisit this project. Maybe you can help and come along for the ride.
The pull request still persists. github.com/LinuxCNC/linuxcnc/pull/900
I got it working but it needed a bit of cleanup once the devs reviewed. It really needs to be completed.
This gets pretty deep into the Linuxcnc internals. The interpreter and motion are totally seperate entities in Linuxcnc. The interpreter tokenises the gcode so motion only sees the waypoints.
The interpreter knows or can calculate the centre of the G2/G3 arc and its radius. Motion does not. The change which enabled this was the release of state tags. State Tags passes the interpreter state to motion in real time.
github.com/LinuxCNC/linuxcnc/blob/master...c/motion/state_tag.h
I extended the tags to include
GM_FIELD_FLOAT_ARC_RADIUS,
GM_FIELD_FLOAT_ARC_CENTER_X,
GM_FIELD_FLOAT_ARC_CENTER_Y,
GM_FIELD_FLOAT_STRAIGHT_HEADING,
The last field is the heading you need for your knife.
I published all of these state tags as interp.* pins including the heading so interp.heading is exactly what you need!
I was thinking recently now I am retired I should revisit this project. Maybe you can help and come along for the ride.
Time to create page: 0.788 seconds