Feature Request
- snowgoer540
-
 Topic Author
Topic Author
- Offline
- Moderator
-

- Posts: 2553
- Thank you received: 886
The problem is the accumulated rounding error (I assume) is still too great. For some reason this effects my X axis more this go-round.
After I perform the steps to induce the issue, the X axis shutters worse than the Y axis, and I can rapid it right through the soft limit and trip the home/limit switch. On the right side, I ran it off the gear track
 It gave me following errors at the same time.
It gave me following errors at the same time.Interestingly enough, for experimentation sake, I un-commented the "setp pid.x.maxerror .0005" lines and it seemed to shutter less (edit: I should say it shutters much softer). It still loses its spacial orientation though.
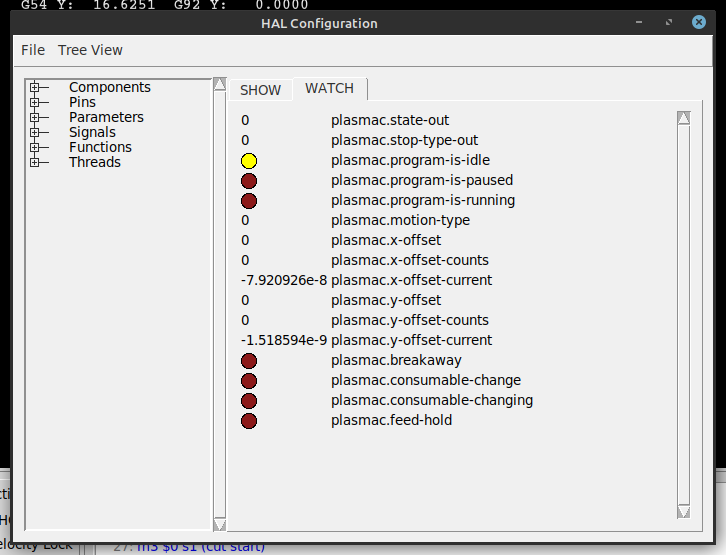
Attached a screenshot of the offset errors.
Edit: I learned that re-homing does straighten it back out. So at least I dont have to close and re-open all the time now while testing.
Attachments:
Please Log in or Create an account to join the conversation.
- phillc54
-

- Offline
- Platinum Member
-

- Posts: 5711
- Thank you received: 2100
Yes, it needs to clear the X/Y axis offsetsInteresting approach, I see that it sends it back to the pause location now when you press stop.
I think it is the way floating point numbers are represented. Your shown offset-current values are X 0.00000007920926 and Y 0.000000001518594. I wouldn't have thought that would cause any issues but...The problem is the accumulated rounding error (I assume) is still too great. For some reason this effects my X axis more this go-round.
It seems this is an issue with the eoffsets feature. We cannot change the offset-current values, they are an output and are just informing us what the current actual offset is. There are axis.a.eoffset-clear and axis.b.eoffset-clear pins but I tried them and they make no difference.
Interesting...Edit: I learned that re-homing does straighten it back out. So at least I dont have to close and re-open all the time now.
Please Log in or Create an account to join the conversation.
- snowgoer540
-
Topic Author
- Offline
- Moderator
-
- Posts: 2553
- Thank you received: 886
Just doubt I would have come up with that, I like it... simple, yet effective. Well I guess mostly.Interesting approach, I see that it sends it back to the pause location now when you press stop.
Yes, it needs to clear the X/Y axis offsets
Wish I could offer some help here. It seems like such a small problem, but I guess it's a problem nonetheless lol.
I think it is the way floating point numbers are represented. Your shown offset-current values are X 0.00000007920926 and Y 0.000000001518594. I wouldn't have thought that would cause any issues but...The problem is the accumulated rounding error (I assume) is still too great. For some reason this effects my X axis more this go-round.
It seems this is an issue with the eoffsets feature. We cannot change the offset-current values, they are an output and are just informing us what the current actual offset is. There are axis.a.eoffset-clear and axis.b.eoffset-clear pins but I tried them and they make no difference.
I thought so too. It sets all the offsets back to 0.
Interesting...Edit: I learned that re-homing does straighten it back out. So at least I dont have to close and re-open all the time now.
Any ideas why un-commenting the max-error lines made the shutter softer? I thought those lines didnt mean anything to a stepper system, or maybe I totally misunderstood and they really are necessary?
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
- Posts: 5711
- Thank you received: 2100
I am not sure that it is something we can do anything about. I'll have a bit of a look around and may have to ask on the developers list.Wish I could offer some help here. It seems like such a small problem, but I guess it's a problem nonetheless lol.
I only know what PCW described here:Any ideas why un-commenting the max-error lines made the shutter softer? I thought those lines didnt mean anything to a stepper system, or maybe I totally misunderstood and they really are necessary?
github.com/LinuxCNC/linuxcnc/issues/910
Please Log in or Create an account to join the conversation.
- snowgoer540
-
Topic Author
- Offline
- Moderator
-
- Posts: 2553
- Thank you received: 886
Bummer. I wish it didn't potentially mean a crash if someone stumbles across it unknowingly. Hopefully they can shed some light. Maybe the eoffset-clear pins are messing up, and we inadvertently found a deeper bug??I am not sure that it is something we can do anything about. I'll have a bit of a look around and may have to ask on the developers list.
Smart man that Peter is. It's way over my head.I only know what PCW described here:
github.com/LinuxCNC/linuxcnc/issues/910
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
- Posts: 5711
- Thank you received: 2100
We don't actually clear the eoffsets, that would result in motion at the max velocity, what we do is bring the eoffset count back to zero at a rate governed by the F word. The rest is handled internally in LinuxCNC.
Bummer. I wish it didn't potentially mean a crash if someone stumbles across it unknowingly. Hopefully they can shed some light. Maybe the eoffset-clear pins are messing up, and we inadvertently found a deeper bug??I am not sure that it is something we can do anything about. I'll have a bit of a look around and may have to ask on the developers list.
Smart man that Peter is. It's way over my head.[/quote]I only know what PCW described here:
github.com/LinuxCNC/linuxcnc/issues/910
Mine too, I just follow along...
Could you try it with X and Y both set to 0.1
Please Log in or Create an account to join the conversation.
- snowgoer540
-
Topic Author
- Offline
- Moderator
-
- Posts: 2553
- Thank you received: 886
Could you try it with X and Y both set to 0.1
I just laid down to hit the hay, I’ll try it in the morning before I head to work... that said you might be on to something. I forgot I set my Y position for CC to Y1 during previous testing to see if it being away from the soft limit would help. X was still zero. Maybe that’s why Y seemed better and X didn’t?
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
- Posts: 5711
- Thank you received: 2100
Sleeping on the job, we can't have that.I just laid down to hit the hay
I pushed some more changes, better feed rate calcs, better error handling and also it will restrict the travel for consumable change to 10mm (0.4") from all limits.
I don't think it will affect the stutter issue but I have something for you to try.
When you get to stage that you see the stutter issue, back away from the limit then in Halshow in this order:
- put a watch on plasmac:offset-enable
- unlinkp plasmac.offset-enable
- sets plasmac:offset-enable 0
two lines have a colon and one line has a period.
when you put the watch on, the led should have been on, then it should have extinguished when you did the sets command.
Now jog to the soft limits and see what happens.
Edit: you will need to net the plasmac.offset-enable pin to the plasmac:offset-enable signal to get the table to work again or restat LinuxCNC. (net plasmac:offset-enable plasmac.offset-enable)
Please Log in or Create an account to join the conversation.
- snowgoer540
-
Topic Author
- Offline
- Moderator
-
- Posts: 2553
- Thank you received: 886
Sleeping on the job, we can't have that.
Don't tell my boss that I didn't have time before work to check this out after all. I know bosses don't like excuses, but I'm dog-sitting for my sister, and they're less excited than I am to get up at 4:45am, much less go downstairs, do their business, and come back up in an acceptable amount of time.
At any rate, it gives me something to look forward to testing after work. Thanks for picking away at it!
I was unaware you could link and unlink pins in halshow....learn something new every day!
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-
- Posts: 21683
- Thank you received: 7405
Using sensors as end stops is not a good idea, hard stops should be where your sensors are and sensors should be mounted sideways.
Please Log in or Create an account to join the conversation.