Search Results (Searched for: )
- timo
- timo
16 Jun 2026 05:48
Replied by timo on topic Linux system is weird
Linux system is weird
Category: General LinuxCNC Questions
- timo
- timo
16 Jun 2026 05:21
Linux system is weird was created by timo
Linux system is weird
Category: General LinuxCNC Questions
- awallin
- awallin
16 Jun 2026 04:27
Replied by awallin on topic Ethercat installation from repositories - how to step by step
Ethercat installation from repositories - how to step by step
Category: EtherCAT
- spumco
- spumco
16 Jun 2026 02:15
Replied by spumco on topic Setting up the Stepperonline A6 battery encoder cable
Setting up the Stepperonline A6 battery encoder cable
Category: EtherCAT
- fer662
- fer662
16 Jun 2026 01:51
Replied by fer662 on topic Setting up the Stepperonline A6 battery encoder cable
Setting up the Stepperonline A6 battery encoder cable
Category: EtherCAT
- Alex
- Alex
15 Jun 2026 21:45
Replied by Alex on topic please help five Axis with Vismach simulation and Mesa 7i96S
please help five Axis with Vismach simulation and Mesa 7i96S
Category: General LinuxCNC Questions
- tommylight

15 Jun 2026 21:29
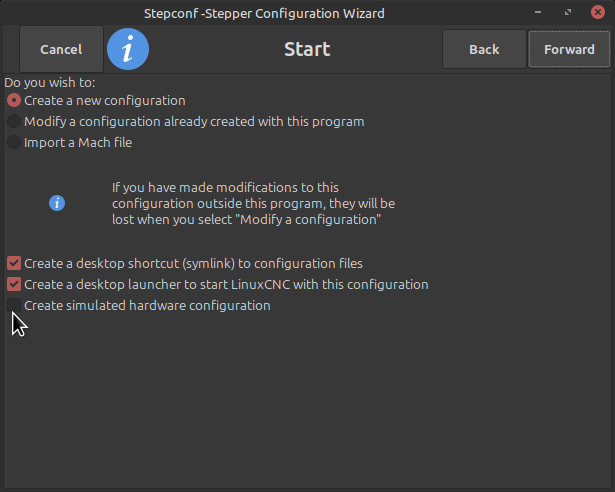
Replied by tommylight on topic eine neue Maschine mit stepconfig erstellt eine Simulationsmaschine.
eine neue Maschine mit stepconfig erstellt eine Simulationsmaschine.
Category: General LinuxCNC Questions
- karlhe
- karlhe
15 Jun 2026 19:37 - 15 Jun 2026 19:38
- jarcysgru
- jarcysgru
15 Jun 2026 19:13 - 15 Jun 2026 19:15
Replied by jarcysgru on topic Ucięty widok AXIS
Ucięty widok AXIS
Category: General LinuxCNC Questions
- andrax

15 Jun 2026 17:42
Replied by andrax on topic Setting up the Stepperonline A6 battery encoder cable
Setting up the Stepperonline A6 battery encoder cable
Category: EtherCAT
- jarcysgru
- jarcysgru
15 Jun 2026 17:27
Replied by jarcysgru on topic Ucięty widok AXIS
Ucięty widok AXIS
Category: General LinuxCNC Questions
- jarcysgru
- jarcysgru
15 Jun 2026 16:22 - 15 Jun 2026 16:26
Replied by jarcysgru on topic Ucięty widok AXIS
Ucięty widok AXIS
Category: General LinuxCNC Questions
- fer662
- fer662
15 Jun 2026 15:57
Replied by fer662 on topic Setting up the Stepperonline A6 battery encoder cable
Setting up the Stepperonline A6 battery encoder cable
Category: EtherCAT
- tommylight
15 Jun 2026 14:19
Replied by tommylight on topic Retrofit of machine
Retrofit of machine
Category: General LinuxCNC Questions
- tommylight
15 Jun 2026 14:10
Replied by tommylight on topic Ucięty widok AXIS
Ucięty widok AXIS
Category: General LinuxCNC Questions
Time to create page: 1.006 seconds