Search Results (Searched for: )
- Evgeny
- Evgeny
01 Sep 2024 18:05
Replied by Evgeny on topic Marco Reps video on youtube about EtherCAT
Marco Reps video on youtube about EtherCAT
Category: EtherCAT

- arijitdutta
- arijitdutta
01 Sep 2024 18:03
Replied by arijitdutta on topic Sliders for overrides in gmoccapy
Sliders for overrides in gmoccapy
Category: General LinuxCNC Questions
- jimwhiting
- jimwhiting
01 Sep 2024 17:55
Replied by jimwhiting on topic ATC: carousel.comp with Servo drive
ATC: carousel.comp with Servo drive
Category: General LinuxCNC Questions
- jimwhiting
- jimwhiting
01 Sep 2024 17:52
Replied by jimwhiting on topic Marco Reps video on youtube about EtherCAT
Marco Reps video on youtube about EtherCAT
Category: EtherCAT
- Yoshyluebeck
- Yoshyluebeck
01 Sep 2024 17:48
- Evgeny
- Evgeny
01 Sep 2024 17:26
Replied by Evgeny on topic Marco Reps video on youtube about EtherCAT
Marco Reps video on youtube about EtherCAT
Category: EtherCAT
- chrisfischer
- chrisfischer
01 Sep 2024 17:08
Replied by chrisfischer on topic Marco Reps video on youtube about EtherCAT
Marco Reps video on youtube about EtherCAT
Category: EtherCAT
- Aciera

01 Sep 2024 16:25 - 01 Sep 2024 16:26
Replied by Aciera on topic NGCGUI arc1 and arc2 are not adding a tool offset
NGCGUI arc1 and arc2 are not adding a tool offset
Category: Mill Library
- Norman
- Norman
01 Sep 2024 15:50 - 08 Sep 2024 20:26
- Creative25
- Creative25
01 Sep 2024 15:10
Replied by Creative25 on topic Building a chain driven Plasma table.
Building a chain driven Plasma table.
Category: General LinuxCNC Questions
- Aciera
01 Sep 2024 14:51
Replied by Aciera on topic Modbus VFD startup delay?
Modbus VFD startup delay?
Category: Basic Configuration
- JackRay
- JackRay
01 Sep 2024 14:50
Replied by JackRay on topic 5 Axis configuration on linuxcnc
5 Axis configuration on linuxcnc
Category: Advanced Configuration
- Evgeny
- Evgeny
01 Sep 2024 14:27
Replied by Evgeny on topic Marco Reps video on youtube about EtherCAT
Marco Reps video on youtube about EtherCAT
Category: EtherCAT
- CADdy

01 Sep 2024 14:12
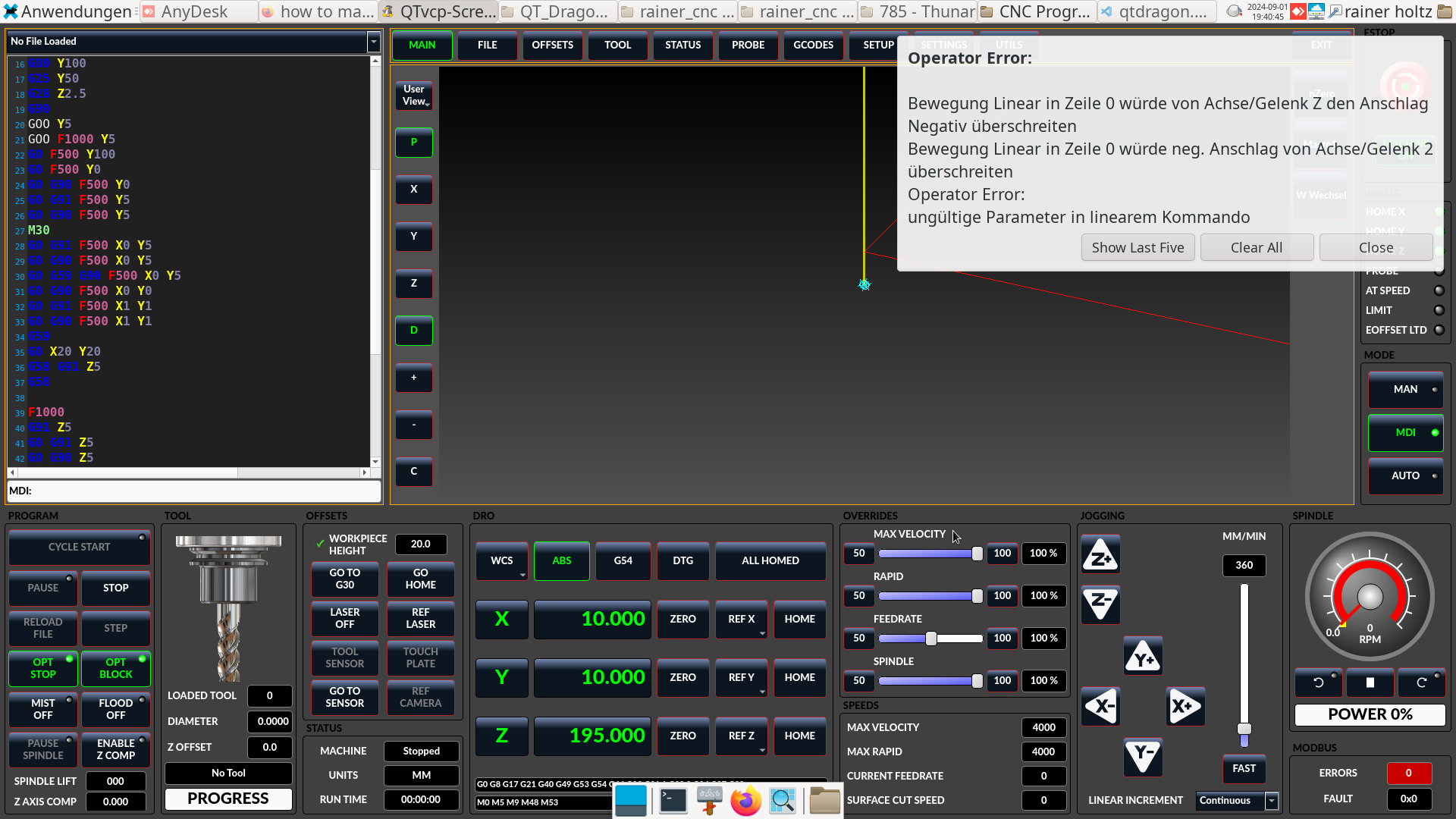
Replied by CADdy on topic Which settings are currently valid?
Which settings are currently valid?
Category: Qtvcp
- PCW

01 Sep 2024 13:58 - 01 Sep 2024 14:51
Replied by PCW on topic Error while Running Linuxcnc
Error while Running Linuxcnc
Category: Driver Boards
Time to create page: 0.656 seconds