Search Results (Searched for: )
- acondit
- acondit
27 Aug 2024 15:54
Replied by acondit on topic Converting a 7i76e config to 7c81/7i76 pair
Converting a 7i76e config to 7c81/7i76 pair
Category: General LinuxCNC Questions
- Todd Zuercher

27 Aug 2024 15:39

- karlhe
- karlhe
27 Aug 2024 15:39
Replied by karlhe on topic durchmesser stimmt nicht
durchmesser stimmt nicht
Category: Other User Interfaces
- snowgoer540

27 Aug 2024 15:34 - 06 Sep 2024 05:50
What Factors to Consider When Choosing a Pick and Place Machine? was created by snowgoer540
What Factors to Consider When Choosing a Pick and Place Machine?
Category: Pick and Place
- gardenweazel

27 Aug 2024 15:06
Replied by gardenweazel on topic QTDragon spindle raise issues
QTDragon spindle raise issues
Category: Qtvcp
- PCW

27 Aug 2024 14:48
Replied by PCW on topic Error while Running Linuxcnc
Error while Running Linuxcnc
Category: Driver Boards
- AndyDM01
- AndyDM01
27 Aug 2024 14:32
Replied by AndyDM01 on topic Amplifier Fault ECT60 Closed Loop
Amplifier Fault ECT60 Closed Loop
Category: EtherCAT
- Aciera

27 Aug 2024 14:24 - 27 Aug 2024 14:26
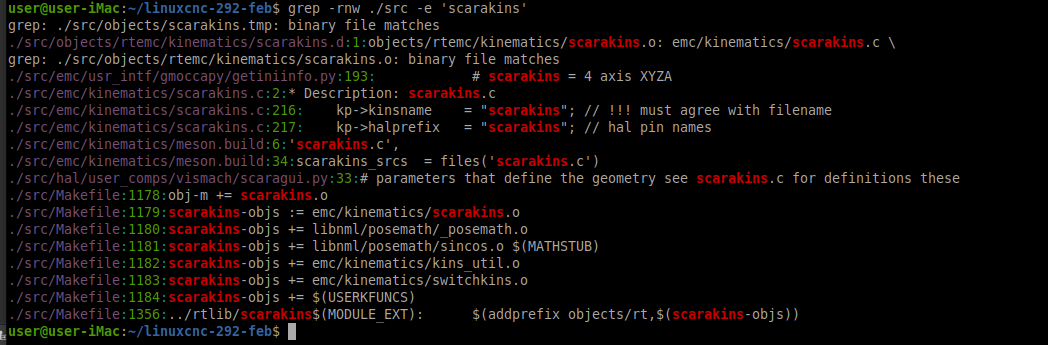
Replied by Aciera on topic Compiling extra Kinematics
Compiling extra Kinematics
Category: Installing LinuxCNC
- jjdege

27 Aug 2024 14:18 - 27 Aug 2024 14:21
Replied by jjdege on topic what am I missing ? no movement!
what am I missing ? no movement!
Category: EtherCAT
- yathish
- yathish
27 Aug 2024 14:15
- scottlaird

27 Aug 2024 14:11
Replied by scottlaird on topic problem with running ethercat
problem with running ethercat
Category: EtherCAT
- Aciera
27 Aug 2024 14:11
Replied by Aciera on topic scarakins axis follow problem in -x and -y zone
scarakins axis follow problem in -x and -y zone
Category: Advanced Configuration
- Masiwood123

27 Aug 2024 13:56
- besriworld
- besriworld
27 Aug 2024 13:49
- nartburg
- nartburg
27 Aug 2024 13:46
Replied by nartburg on topic Compiling extra Kinematics
Compiling extra Kinematics
Category: Installing LinuxCNC
Time to create page: 0.493 seconds