Search Results (Searched for: )
- Mecanix
- Mecanix
15 Nov 2024 15:08
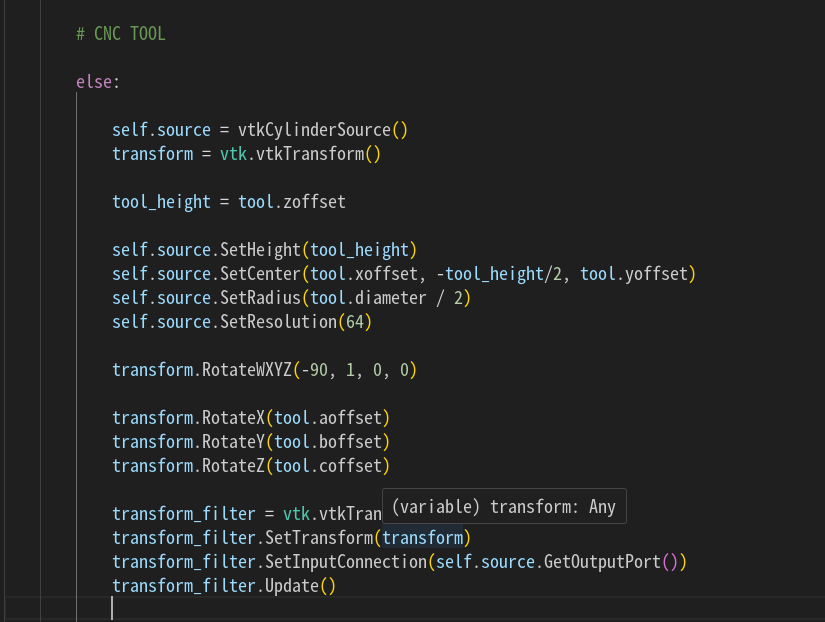
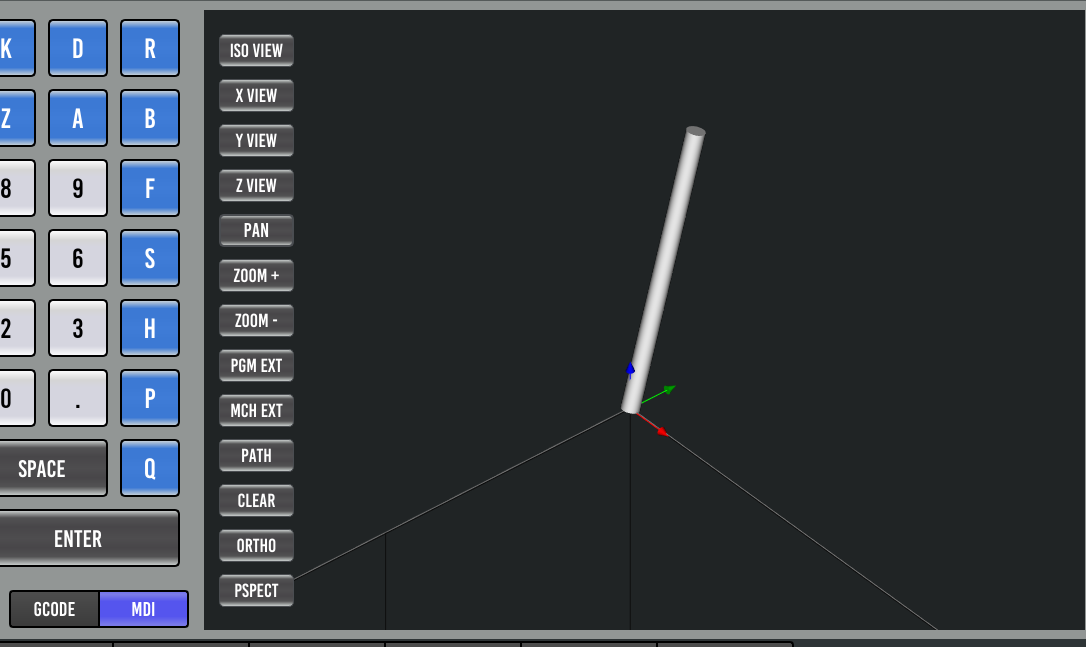
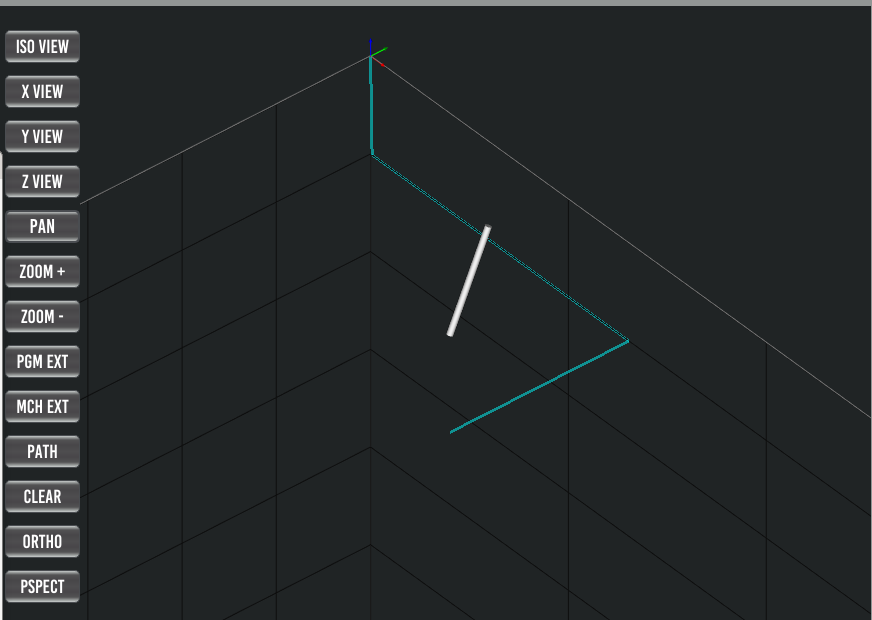
Replied by Mecanix on topic LinuxCNC for lathe questions
LinuxCNC for lathe questions
Category: General LinuxCNC Questions

- slowpoke
- slowpoke
15 Nov 2024 14:44 - 15 Nov 2024 18:28
LinuxCNC for lathe questions was created by slowpoke
LinuxCNC for lathe questions
Category: General LinuxCNC Questions
- Mecanix
- Mecanix
15 Nov 2024 14:41 - 15 Nov 2024 14:46
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- PCW

15 Nov 2024 14:37 - 15 Nov 2024 14:39
Replied by PCW on topic Suggestion for a PCI EPP card for 7i43
Suggestion for a PCI EPP card for 7i43
Category: General LinuxCNC Questions
- Mecanix
- Mecanix
15 Nov 2024 14:30 - 15 Nov 2024 14:32
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- JT

15 Nov 2024 13:54
- hmearns
- hmearns
15 Nov 2024 13:09
Replied by hmearns on topic Novakon Mill Conversion - Getting Started
Novakon Mill Conversion - Getting Started
Category: CNC Machines
- AD_15
- AD_15
15 Nov 2024 12:39
Unrecognized error -1 was created by AD_15
Unrecognized error -1
Category: General LinuxCNC Questions
- aleksamc

15 Nov 2024 12:19
Replied by aleksamc on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- juliankoenig87
- juliankoenig87
15 Nov 2024 08:46
Replied by juliankoenig87 on topic Suggestion for a PCI EPP card for 7i43
Suggestion for a PCI EPP card for 7i43
Category: General LinuxCNC Questions
- juliankoenig87
- juliankoenig87
15 Nov 2024 08:43
Replied by juliankoenig87 on topic Suggestion for a PCI EPP card for 7i43
Suggestion for a PCI EPP card for 7i43
Category: General LinuxCNC Questions
- Dougal9887
- Dougal9887
15 Nov 2024 07:41
Replied by Dougal9887 on topic Error when trying to open Gmoccapy confiuration.
Error when trying to open Gmoccapy confiuration.
Category: Gmoccapy
- rebelx
- rebelx
15 Nov 2024 06:41 - 15 Nov 2024 06:47
Replied by rebelx on topic linuxcnc 2.9.2 (live) on the intel n100 cpu
linuxcnc 2.9.2 (live) on the intel n100 cpu
Category: Computers and Hardware
- Tim Bee
- Tim Bee
15 Nov 2024 06:23


- Aciera

15 Nov 2024 06:05
Replied by Aciera on topic Error when trying to open Gmoccapy confiuration.
Error when trying to open Gmoccapy confiuration.
Category: Gmoccapy
Time to create page: 0.473 seconds